16.42. multi_stereo¶
The multi_stereo program takes as input a set of images and
cameras, runs pairwise stereo between each image/camera and the next
one in the list, filters the produced points clouds, fuses them, and
creates a mesh. The input cameras are found using
Structure-from-Motion.
For the moment, this program is very tied to rig_calibrator
(Section 16.60). It will become more generic and versatile
with time. In particular, logic is planned for automatically selecting
stereo pairs and for distributing and load-balancing all resulting
processing jobs over multiple machines.
16.42.1. Examples¶
Here we will create a mesh of a small portion of the International Space Station (ISS), based on images acquired with the Astrobee robot (later this example will be expanded to a full module).
In this example it is very important to choose for pairwise stereo
images with a convergence angle of about 5-10 degrees. A smaller
convergence angle results in unreliable depth determination, while for
a bigger one the scene changes enough sometimes that stereo
correlation can be erroneous, resulting in artifacts. Note that
rig_calibrator (as well as bundle_adjust and
parallel_stereo) compute the convergence angles.
Then, pc_filter was used for filtering blunders according
to many geometric criteria.
The 7-image dataset used below, the full recipe, and output mesh, are available for download.
See another example in Section 10.3. That one runs stereo on pairs of images created with a stereo rig onboard the MSL Curiosity rover.
16.42.1.1. Creation of camera models¶
We follow the approach in Section 16.60, but with a rig consisting of just one camera.
The camera intrinsics and the images are used to find the camera poses:
theia_sfm --rig-config camera_config.txt \
--images 'images/nav_cam/*jpg' \
--out-dir theia_out
Note that the images are stored in the nav_cam subdirectory, and
each image name consists of a number and an image extension, following
the conventions used by rig_calibrator, even though here we have
just a single sensor acquiring all images.
Next is refinement of camera poses and registration to world coordinates (this requires first manually picking some features with known 3D positions in the images, per Section 16.60.11):
rig_calibrator \
--rig-config camera_config.txt \
--nvm theia_out/cameras.nvm \
--camera-poses-to-float "nav_cam" \
--intrinsics-to-float "" \
--num-iterations 100 \
--num-passes 2 \
--num-overlaps 10 \
--registration \
--hugin-file control_points.pto \
--xyz-file xyz.txt \
--out-dir rig_out
Registration to world coordinates is optional. It is still suggested to use at least some rough guesses for where the world positions of some points are. The camera configuration will not be deformed in order to fit precisely the measurements; a single best-fit similarity transform will be applied to the whole setup.
16.42.1.2. Running stereo and mesh creation¶
As mentioned earlier, the geometry of the scene being imaged requires some careful choices of parameters for stereo. Then, this tool calls several other tools under the hood, so options for those should be set as well. Here’s a recipe which works reasonably well:
maxDistanceFromCamera=3.0
stereo_opts="
--stereo-algorithm asp_mgm
--alignment-method affineepipolar
--ip-per-image 10000
--min-triangulation-angle 0.5
--global-alignment-threshold 5
--session nadirpinhole
--no-datum
--corr-seed-mode 1
--max-disp-spread 300
--ip-inlier-factor 0.4
--nodata-value 0"
pc_filter_opts="
--max-camera-ray-to-surface-normal-angle 75
--max-valid-triangulation-error 0.0025
--max-distance-from-camera $maxDistanceFromCamera
--blending-dist 50 --blending-power 1"
mesh_gen_opts="
--min_ray_length 0.1
--max_ray_length $maxDistanceFromCamera
--voxel_size 0.01"
multi_stereo \
--rig_config rig_out/rig_config.txt \
--camera_poses rig_out/cameras.txt \
--undistorted_crop_win '1100 700' \
--rig_sensor nav_cam \
--first_step stereo \
--last_step mesh_gen \
--stereo_options "$stereo_opts" \
--pc_filter_options "$pc_filter_opts" \
--mesh_gen_options "$mesh_gen_opts" \
--out_dir stereo_out
The surface resolution of the cameras is on the order of 1 mm (0.001
meters), the camera is about 1-3 meters from the surface, hence a good
value for the triangulation error was about 0.0025 meters, and the
points in the cloud were binned (before meshing) into voxels of size
0.005 meters. Later some of these choices will be automated, or
scale-independent parameters will be provided. The value
--max-disp-spread 300 is about right for this case, but should
normally be omitted as sometimes it may restrict the disparity
unnecessarily.
There are three steps happening above, namely:
stereo: Runs
parallel_stereo(Section 16.51) and writes a point cloud in .tif format for each image/camera in the list and the next one. This is the most time-consuming step.pc_filter: For each point cloud runs
pc_filter(Section 16.54) and writes filtered point clouds in .tif and .pcd formats, and a textured mesh for that run in .obj format. The .pcd file is in left camera’s coordinates. The .obj file is for individual stereo run inspection purposes.mesh_gen: Use
voxblox_mesh(Section 16.79) to fuse the filtered point clouds in .pcd format and create a mesh in .ply format.
The images are undistorted internally before stereo is run. (The undistortion step may be optional in future versions.)
See --first_step and --last_step in
Section 16.42.3 for how to choose which processing
steps to run. This tool also has controls for the range of images to run.
16.42.1.3. Creating a textured mesh¶
The obtained mesh can be post-processed (smoothed, hole-filled, etc.)
using a handful of CGAL-based tools shipped with ASP
(Section 16.13). Then, it can be textured with the original
images using the texrecon tool (Section 16.75) as:
texrecon --rig_config rig_out/rig_config.txt \
--camera_poses rig_out/cameras.txt \
--mesh stereo_out/nav_cam/fused_mesh.ply \
--rig_sensor nav_cam \
--undistorted_crop_win '1100 700' \
--out_dir stereo_out
This produces stereo_out/nav_cam/texture.obj.
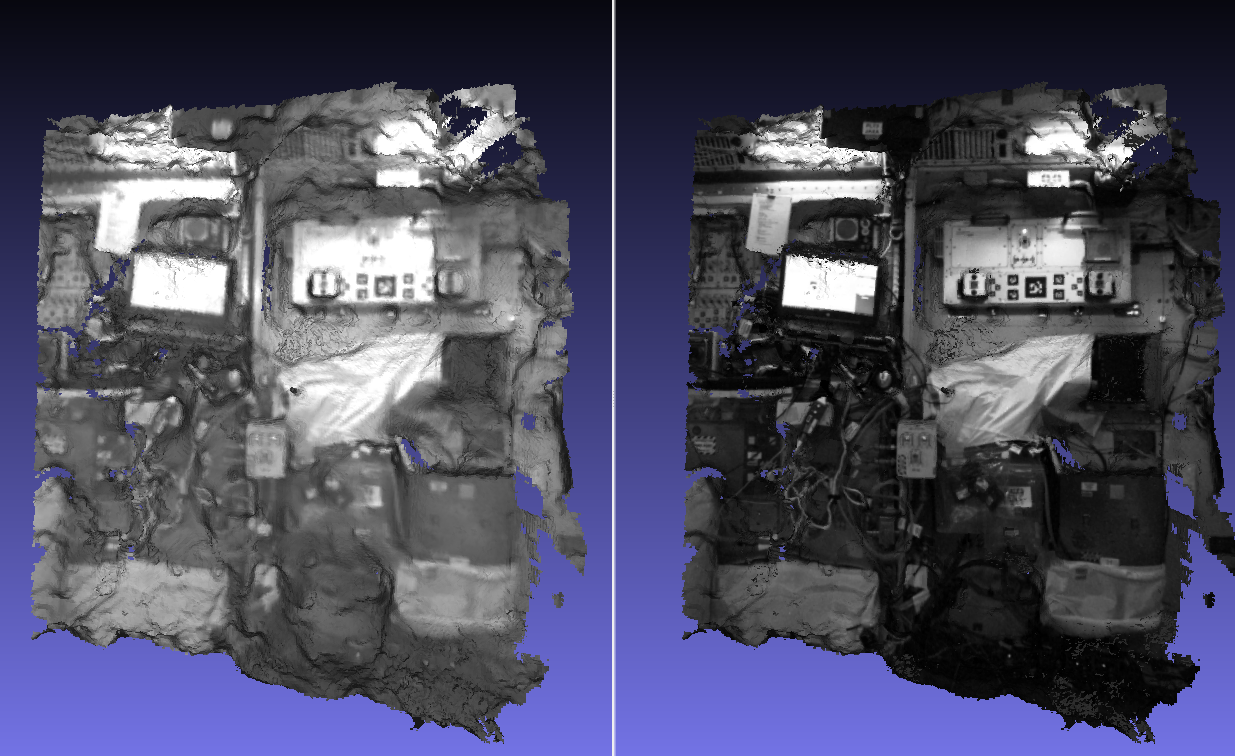
Fig. 16.23 Fused .ply mesh and textured .obj file produced by voxblox_mesh
and texrecon (left and right). Here, no smoothing or hole-filling
of the meshes was used (Section 16.13). See Section 10.2
for an example of mesh and texture creation for depth data.¶
16.42.2. Handling issues¶
If the produced mesh is noisy, it is suggested to inspect individual
.obj files produced by each stereo pair, the triangulation error of
each filtered point cloud (fourth band, extractable with
gdal_translate -b 4), and the blending weight files saved by
pc_filter.
One may need to decrease the value of
--max-valid-triangulation-error, use less of the boundary image
region (--undistorted_crop_win) or redo the bundle adjustment with
rig_calibrator.
16.42.3. Command-line options for multi_stereo¶
- --rig_config <string (default: “”)>
Rig configuration file.
- --rig_sensor <string (default: “”)>
Which rig sensor images to use. Must be among the sensors specified via
--rig_config. To use images from several sensors, pass in a quoted list of them, separated by a space.- --camera_poses <string (default: “”)>
Read images and camera poses for this sensor from this list.
- --out_dir <string (default: “”)>
The directory where to write the stereo output, textured mesh, other data.
- --stereo_options <string (default: “”)>
Options to pass to
parallel_stereo. Use double quotes around the full list and simple quotes if needed by an individual option, or vice-versa.- --pc_filter_options <string (default: “”)>
Options to pass to
pc_filter.- --mesh_gen_options <string (default: “”)>
Options to pass to
voxblox_meshfor mesh generation.- --undistorted_crop_win <string (default: “”)>
The dimensions of the central image region to keep after the internal undistortion step and before using it in stereo. Normally 85% - 90% of distorted (actual) image dimensions would do. Suggested the Astrobee images: sci_cam: ‘1250 1000’ nav_cam: ‘1100 776’. haz_cam: ‘250 200’.
- --first_step <string (default: “stereo”)>
Let the first step run by this tool be one of: ‘stereo’, ‘pc_filter’, or ‘mesh_gen’. This allows resuming a run at a desired step. The stereo subdirectories are deleted before that step takes place.
- --last_step <string (default: “mesh_gen”)>
The last step run by this tool. See
--first_stepfor allowed values.- --first-image-index <integer (default: None)>
The index of the first image to use for stereo, in the list of images. Indices start from 1. By default, use all the images.
- --last-image-index <integer (default: None)>
The index of the last image to use for stereo, in the list of images. Indices start from 1. By default, use all the images.
- --left <string (default: “”)>
Instead of running pairwise stereo between every image and the next one given in
--camera_poses, use every image from this list and corresponding one from the list given by the--rightoption.- --right <string (default: “”)>
To be used with
--left.- -h, --help
Show this help message and exit.