13. Error propagation¶
At the triangulation stage, parallel_stereo can propagate the
errors (uncertainties, standard deviations, covariances) from the
input cameras, computing the horizontal and vertical standard
deviation (stddev) of the uncertainty for each triangulated
point. This is enabled with the option --propagate-errors
(Section 17.6).
Bundle adjustment can propagate uncertainties as well (Section 16.5.11.8).
The produced uncertainties can be exported from the point cloud to DEM and/or LAS files (Section 13.4).
13.1. The input uncertainties¶
The input uncertainties can be either numbers that are passed on the command line, or, otherwise, for a few camera models, they can be read from the camera files.
If the option --horizontal-stddev is set, with two positive
numbers as values, representing the left and right camera stddev of
position uncertainty in the local horizontal ground plane having the
triangulated point, then these values will be used. The input stddev
values are measured in meters. This functionality works with any
cameras supported by ASP.
If this option is not set, the following strategies are used:
For Pleiades 1A/1B linescan camera models (Section 8.25) (but not for NEO, Section 8.25.4) the
ACCURACY_STDVfield is read from the “DIM” XML file for each camera (in the Absolute Horizontal Accuracy section of the camera model), and it is used as the horizontal stddev.For RPC cameras (Section 8.23), the values
ERRBIASandERRRANDare read, whether set in XML files or as part of metadata that GDAL understands. The square root of sum of squares of these quantities is the input horizontal stddev for a camera.For Maxar (DigitalGlobe) linescan cameras (Section 5), the inputs are the satellite position and orientation covariances, read from the
EPHEMLISTandATTLISTfields. These are propagated from the satellites to the ground and then through triangulation.
For datasets with a known CE90 measure, or in general a
\(CE_X\) measure, where \(X\) is between 0% and 100%,
use the --horizontal-stddev option, with values computed
using the formula:
(reference).
In all cases, the error propagation takes into account whether the cameras are bundle-adjusted or not (Section 16.5), and if the images are mapprojected (Section 6.1.7).
13.2. Produced uncertainty for triangulated points¶
The triangulation covariance matrix is computed in the local North-East-Down (NED) coordinates at each nominal triangulated point, and further decomposed into the horizontal and vertical components (Section 13.8).
The square root is taken, creating the horizontal and vertical standard
deviations, that are saved as the 5th and 6th band in the point cloud
(*-PC.tif file, Section 19). Running gdalinfo
(Section 16.25) on the point cloud will show some metadata describing
each band in that file.
The computed stddev values are in units of meter.
13.3. Bundle adjustment¶
Error propagation is also implemented in bundle_adjust
(Section 16.5.11.8). In that case, the errors are computed at each
interest point, rather than densely.
The same underlying logic is employed as for stereo.
13.4. Export to DEM and LAS¶
The stddev values in the point cloud can then be gridded with point2dem
(Section 16.56) with the option --propagate-errors, using the same
algorithm as for computing the DEM heights.
Example:
point2dem \
--t_srs <projection string> \
--tr <grid size> \
--propagate-errors \
run/run-PC.tif
This will produce the files run/run-HorizontalStdDev.tif and
run/run-VerticalStdDev.tif alongside the output DEM, run/run-DEM.tif.
In all these files the values are in units of meter.
The point2las program (Section 16.57) can export the horizontal and
vertical stddev values from the point cloud to a LAS file.
13.5. Implementation details¶
Note that propagating the errors subtly changes the behavior of stereo triangulation, and hence also the output DEM. Triangulated points are saved with a float precision of 1e-8 meters (rather than the usual 1e-3 meters or so, Section 17.5), to avoid creating step artifacts later when gridding the rather slowly varying propagated errors.
When error propagation is enabled, the triangulated point cloud stores 6 bands instead of the usual 4 (Section 19), and the LZW compression is somewhat less efficient since more digits of precision are stored. The size of the point cloud roughly doubles. This does not affect the size of the DEM, but its values and extent may change slightly.
13.6. What the produced uncertainties are not¶
The horizontal and vertical stddev values created by stereo
triangulation and later gridded by point2dem measure the
uncertainty of each nominal triangulated point, given the
uncertainties in the input cameras.
This is not the discrepancy between this point’s location as compared to to a known ground truth. If the input cameras are translated by the same amount in the ECEF coordinate system, the triangulated point position can change a lot, but the produced uncertainties will change very little. To estimate and correct a point cloud’s geolocation invoke an alignment algorithm (Section 16.53).
The produced uncertainties are not a measure of the pointing accuracy (Section 14.6.1). Whether the rays from the cameras meet at the nominal triangulated point perfectly, or their closest distance is, for example, 5 meters, the produced uncertainties around the nominal point will be about the same. See a comparison between these errors in Fig. 13.1 and Fig. 13.2.
The pointing accuracy can be improved by using bundle adjustment (Section 16.5) and solving for jitter (Section 16.38).
13.7. Example¶
For Maxar (DigitalGlobe) linescan cameras:
parallel_stereo \
--alignment-method local_epipolar \
--stereo-algorithm asp_mgm \
--subpixel-mode 9 \
-t dg \
--propagate-errors \
left.tif right.tif left.xml right.xml
run/run
proj="+proj=utm +zone=13 +datum=WGS84 +units=m +no_defs"
point2dem --tr 1.6 \
--t_srs "$proj" \
--propagate-errors \
run/run-PC.tif
The projection and grid size above are dependent on the dataset. For steep slopes, consider using mapprojection (Section 6.1.7).
Alternatively, the input horizontal stddev values for the cameras can be set as:
--horizontal-stddev 1.05 1.11
Then these will be used instead. This last approach works for any orbital camera model supported by ASP (Section 8).
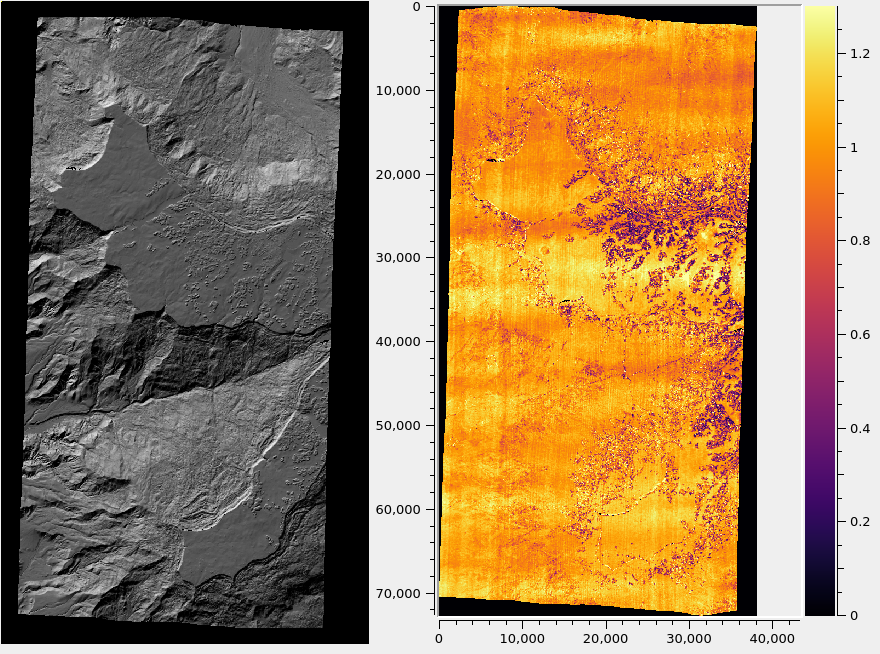
Fig. 13.1 A hillshaded DEM created with DigitalGlobe WorldView images for Grand Mesa, Colorado (left), and the triangulation error (Section 14.6.1) in meters (right). The input images were mapprojected (Section 6.1.7). No bundle adjustment was used. Jitter (Section 16.38) is noticeable.¶
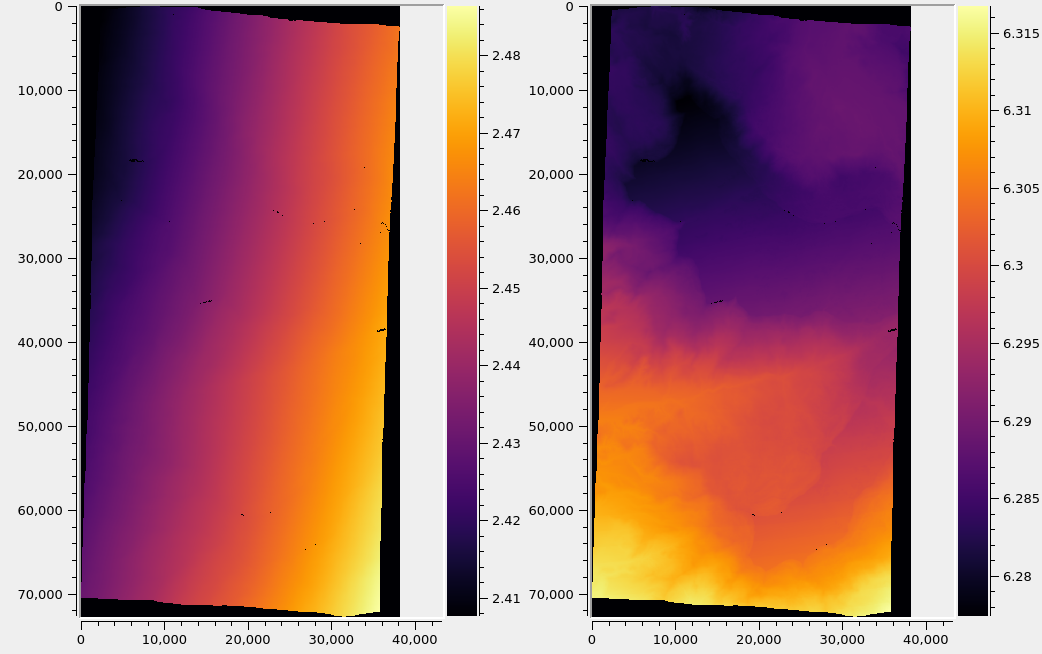
Fig. 13.2 Produced horizontal and vertical stddev values (left and right) for the same dataset. It can be seen from the scales (units are in meter) and comparing with Fig. 13.1 that these errors vary little overall, and depend more on the geometry of the stereo pair than the underlying terrain. See Section 13.6 for a discussion.¶
13.8. Definitions¶
The vertical variance of a triangulated point is defined as the lower-right corner of the 3x3 NED covariance matrix (since x=North, y=East, z=Down).
To find the horizontal variance component, consider the upper-left \(2 \times 2\) block of that matrix. Geometrically, the horizontal covariances represent an ellipse. The radius of the circle with the same area is found, which is the square root of the product of ellipse semiaxes, which is the product of the eigenvalues of this symmetric matrix, or its determinant. So, the horizontal component of the covariance is defined as the square root of the upper-left \(2 \times 2\) bock of the NED covariance matrix.
The square root is taken to go from variance to stddev.
13.9. Theory¶
According to the theory of propagation of uncertainty, given a function \(y = f(x)\) between multi-dimensional spaces, the covariances of the inputs and outputs are related via
Here, \(J\) is the Jacobian of the function \(f\) and \(J^T\) is its transpose. It is assumed that the uncertainties are small enough that this function can be linearized around the nominal location.
For this particular application, the input variables are either the coordinates in the local horizontal ground plane having the triangulated point (two real values for each camera), or the satellite positions and orientations (quaternions), which are 7 real values for each camera. The output is the triangulated point in the local North-East-Down coordinates.
If the input uncertainties are stddev values, then these are squared, creating variances, before being propagated (then converted back to stddev values at the last step).
The Jacobian was computed using centered finite differences, with a step size of 0.01 meters for the position and 1e-6 for the (normalized) quaternions. The computation was not particularly sensitive to these step sizes. A much smaller position step size is not recommended, since the positions are on the order of 7e6 meters, (being measured from planet center) and because double precision computations have only 16 digits of precision.
13.10. Validation for Maxar (DigitalGlobe) linescan cameras¶
The horizontal stddev values propagated through triangulation for Maxar (DigitalGlobe) linescan cameras are usually on the order of 3 meters.
The obtained vertical stddev varies very strongly with the convergence angle, and is usually, 5-10 meters, and perhaps more for stereo pairs with a convergence angle under 30 degrees.
The dependence on the convergence angle is very expected. But these
numbers appear too large given the ground sample distance of
DigitalGlobe WorldView cameras. We are very confident that they are
correct. The results are so large is because of the input orientation
covariances (the relative contribution of input position and
orientation covariances can be determined with the options
--position-covariance-factor and
--orientation-covariance-factor).
The curious user can try the following independent approach to
validate these numbers. The linescan camera files in XML format have
the orientations on lines with the ATTLIST field. The numbers on
that line are measurement index, then the quaternions (4 values, in
order x, y, z, w) and the upper-right half of the 4x4 covariance
matrix (10 numbers, stored row-wise).
The w variance (the last number), can be, for example, on the
order of 6.3e-12. Its square root, the standard deviation, which is
2.5e-6 or so, is the expected variability in the w component of
the quaternion.
Fetch and save the Python script bias_dg_cam.py. Invoke it as:
python bias_dg_cam.py --position-bias "0 0 0" \
--orientation-bias "0 0 0 2.5e-6" \
-i left.xml -o left_bias.xml
python bias_dg_cam.py --position-bias "0 0 0" \
--orientation-bias "0 0 0 -2.5e-6" \
-i right.xml -o right_bias.xml
This will bias the positions and quaternions in the camera files by
the given amounts, creating left_bias.xml and
right_bias.xml. Note that values with different sign were used in
the two camera files. It is instructive to compare the original and
produced camera files side-by-side, and see the effect of using a
different sign and magnitude for the biases.
Then, parallel_stereo can be run twice, with different output
prefixes, first with the original cameras, and then the biased ones,
in both cases without propagation of errors. Use
--left-image-crop-win and --right-image-crop-win
(Section 16.72) to run on small clips only.
The created DEMs (with nominal and then with biased cameras) can have
their heights compared using the geodiff --absolute command
(Section 16.26). We found a height difference that is very similar
to the vertical standard deviation produced earlier.