14. Advanced stereo topics¶
In this chapter we will dive much deeper into understanding the core algorithms in the Stereo Pipeline. We start with an overview of the five stages of stereo reconstruction. Then we move into an in-depth discussion and exposition of the various correlation algorithms.
The goal of this chapter is to build an intuition for the stereo
correlation process. This will help users to identify unusual results in
their DEMs and hopefully eliminate them by tuning various parameters in
the stereo.default file (Section 17). For scientists and
engineers who are using DEMs produced with the Stereo Pipeline, this
chapter may help to answer the question, “What is the Stereo Pipeline
doing to the raw data to produce this DEM?”
A related question that is commonly asked is, “How accurate is a DEM produced by the Stereo Pipeline?” This chapter does not yet address matters of accuracy and error, however we have several efforts underway to quantify the accuracy of Stereo Pipeline-derived DEMs, and will be publishing more information about that shortly. Stay tuned.
The entire stereo correlation process, from raw input images to a point cloud or DEM, can be viewed as a multistage pipeline as depicted in Fig. 14.1, and detailed in the following sections.
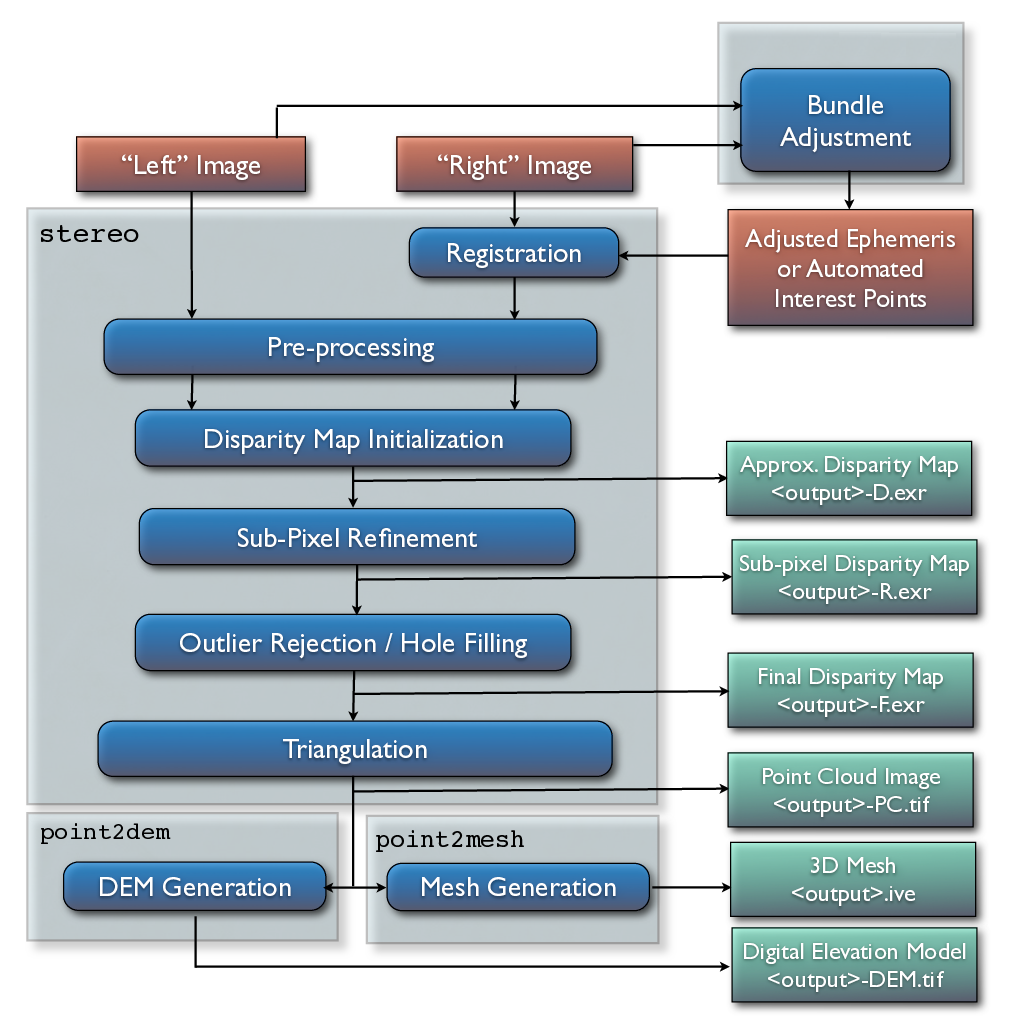
Fig. 14.1 Flow of data through the Stereo Pipeline.¶
14.1. Pre-processing¶
The first optional (but recommended) step in the process is least squares Bundle Adjustment, which is described in detail in Section 12.
Next, the left and right images are roughly aligned using one of
the four methods: (1) a homography transform of the right image
based on automated tie-point measurements (interest point matches),
(2) an affine epipolar
transform of both the left and right images (also based on tie-point
measurements as earlier), the effect of which is equivalent to
rotating the original cameras which took the pictures, (3) a 3D
rotation that achieves epipolar rectification (only implemented for
Pinhole sessions for missions like MER or K10, see
Section 8.5 and Section 8.6) or (4)
map-projection of both the left and right images using the ISIS
cam2map command or through the more general mapproject tool
that works for any cameras supported by ASP (see Section 6.1.7
for the latter). The first three options can be applied automatically
by the Stereo Pipeline when the alignment-method variable in
the stereo.default file is set to affineepipolar, homography,
or epipolar, respectively.
The latter option, running cam2map, cam2map4stereo.py, or
mapproject must be carried out by the user prior to invoking the
parallel_stereo command. Map-projecting the images using ISIS eliminates any
unusual distortion in the image due to the unusual camera acquisition
modes (e.g. pitching “ROTO” maneuvers during image acquisition for MOC,
or highly elliptical orbits and changing line exposure times for the ,
HRSC). It also eliminates some of the perspective differences in the
image pair that are due to large terrain features by taking the existing
low-resolution terrain model into account (e.g. the MOLA, LOLA,
NED, or ULCN 2005 models).
In essence, map-projecting the images results in a pair of very closely matched images that are as close to ideal as possible given existing information. This leaves only small perspective differences in the images, which are exactly the features that the stereo correlation process is designed to detect.
For this reason, we recommend map-projection for pre-alignment of most stereo pairs. Its only cost is longer triangulation times as more math must be applied to work back through the transforms applied to the images. In either case, the pre-alignment step is essential for performance because it ensures that the disparity search space is bounded to a known area. In both cases, the effects of pre-alignment are taken into account later in the process during triangulation, so you do not need to worry that pre-alignment will compromise the geometric integrity of your DEM.
In some cases the pre-processing step may also normalize the pixel
values in the left and right images to bring them into the same
dynamic range. Various options in the stereo.default file affect
whether or how normalization is carried out, including
individually-normalize and force-use-entire-range. Although
the defaults work in most cases, the use of these normalization
steps can vary from data set to data set, so we recommend you refer
to the examples in Section 8 to see if these are necessary
in your use case.
Finally, pre-processing can perform some filtering of the input
images (as determined by prefilter-mode) to reduce noise and
extract edges in the images. When active, these filters apply a
kernel with a sigma of prefilter-kernel-width pixels that can
improve results for noisy images (prefilter-mode must be chosen
carefully in conjunction with cost-mode, see Section 17).
The pre-processing modes that extract image edges are useful for
stereo pairs that do not have the same lighting conditions, contrast,
and absolute brightness [Nis84]. We recommend
that you use the defaults for these parameters to start with, and
then experiment only if your results are sub-optimal.
14.2. Disparity map initialization¶
Correlation is the process at the heart of the Stereo Pipeline. It is a
collection of algorithms that compute correspondences between pixels in the left
image and pixels in the right image. The map of these correspondences is called
a disparity map. This is saved in the file named output_prefix-D.tif
(Section 19.2).
A disparity map is an image whose pixel locations correspond to the pixel \((u,v)\) in the left image, and whose pixel values contain the horizontal and vertical offsets \((d_u, d_v)\) to the matching pixel in the right image, which is \((u+d_u, v+d_v)\).
The correlation process attempts to find a match for every pixel in the left image. The only pixels skipped are those marked invalid in the mask images. For large images (e.g. from HiRISE, , LROC, or WorldView), this is very expensive computationally, so the correlation process is split into two stages. The disparity map initialization step computes approximate correspondences using a pyramid-based search that is highly optimized for speed, but trades resolution for speed. The results of disparity map initialization are integer-valued disparity estimates. The sub-pixel refinement step takes these integer estimates as initial conditions for an iterative optimization and refines them using the algorithm discussed in the next section.
We employ several optimizations to accelerate disparity map initialization: (1) a box filter-like accumulator that reduces duplicate operations during correlation [Sun02]; (2) a coarse-to-fine pyramid based approach where disparities are estimated using low-resolution images, and then successively refined at higher resolutions; and (3) partitioning of the disparity search space into rectangular sub-regions with similar values of disparity determined in the previous lower resolution level of the pyramid [Sun02].
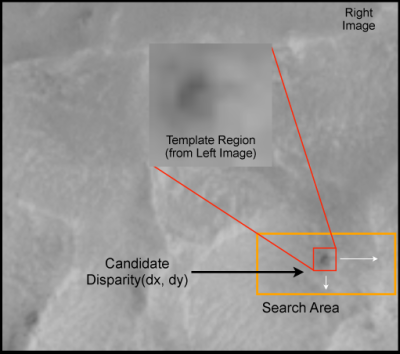
Fig. 14.2 The correlation algorithm in disparity map initialization uses a
sliding template window from the left image to find the best match in
the right image. The size of the template window can be adjusted
using the H_KERN and V_KERN parameters in the
stereo.default file, and the search range can be adjusted using
the {H,V}_CORR_{MIN/MAX} parameters.¶
Naive correlation itself is carried out by moving a small, rectangular
template window from the from left image over the specified search
region of the right image, as in Fig. 14.2. The
“best” match is determined by applying a cost function that compares the
two windows. The location at which the window evaluates to the lowest
cost compared to all the other search locations is reported as the
disparity value. The cost-mode variable allows you to choose one of
three cost functions, though we recommend normalized cross correlation
[Men97], since it is most robust to slight
lighting and contrast variations between a pair of images. Try the
others if you need more speed at the cost of quality.
14.3. Low-resolution disparity¶
Producing the disparity map at full resolution as in Section 14.2 is
computationally expensive. To speed up the process, ASP starts by first creating
a low-resolution initial guess version of the disparity map. This is saved
in the file output_prefix-D_sub.tif (Section 19.2).
Four methods are available for producing this low-resolution disparity, described below.
14.3.1. Disparity from stereo correlation¶
The default approach is to use for the low-resolution disparity the same
algorithm as for the full-resolution one, but called with the low-resolution
images output_prefix-L_sub.tif and output_prefix-R_sub.tif.
Those “sub” images have their size chosen so that their area is around 2.25 megapixels, a size that is easily viewed on the screen unlike the raw source images.
This corresponds to the parallel_stereo option --corr-seed-mode 1
(Section 17).
14.3.2. Disparity from a DEM¶
The low resolution disparity can be computed from a lower-resolution initial
guess DEM of the area. This works with all alignment methods except epipolar
(Section 17.1.2). Mapprojected images are supported
(Section 6.1.7).
This option assumes rather good alignment between the cameras and the DEM.
Otherwise see Section 16.53.14. The option --disparity-estimation-dem-error
should be used to specify the uncertainty in such a DEM.
This can be useful when there are a lot of clouds, or terrain features are not seen well at low resolution.
As an example, invoke parallel_stereo with options along the lines of:
--corr-seed-mode 2 \
--disparity-estimation-dem ref.tif \
--disparity-estimation-dem-error 5
When features are washed out at low resolution, consider also adding the option
--corr-max-levels 2, or see Section 14.3.3.
See Section 17 for more information on these options.
It is suggested to extract the produced low-resolution disparity bands with
gdal_translate (Section 16.33.1.10) or disparitydebug
(Section 16.23). Inspect them in stereo_gui
(Section 16.72).
14.3.3. Sparse disparity from full-resolution images¶
For snowy landscapes, whose only features may be small-scale grooves or ridges sculpted by wind (so-called zastrugi), the low-resolution images appear blank, so the default low-resolution disparity approach in Section 14.3.1 fails.
One can then use a disparity from a DEM (Section 14.3.2), skip the
low-resolution disparity (Section 14.3.4), or the approach outlined in
this section, based on the tool named sparse_disp.
This program create the low-resolution initial disparity
output_prefix-D_sub.tif from the full-resolution images, yet only at a
sparse set of pixels for reasons, of speed. This low-resolution disparity is
then refined as earlier using a pyramid approach, but with fewer levels,
to prevent the features being washed out.
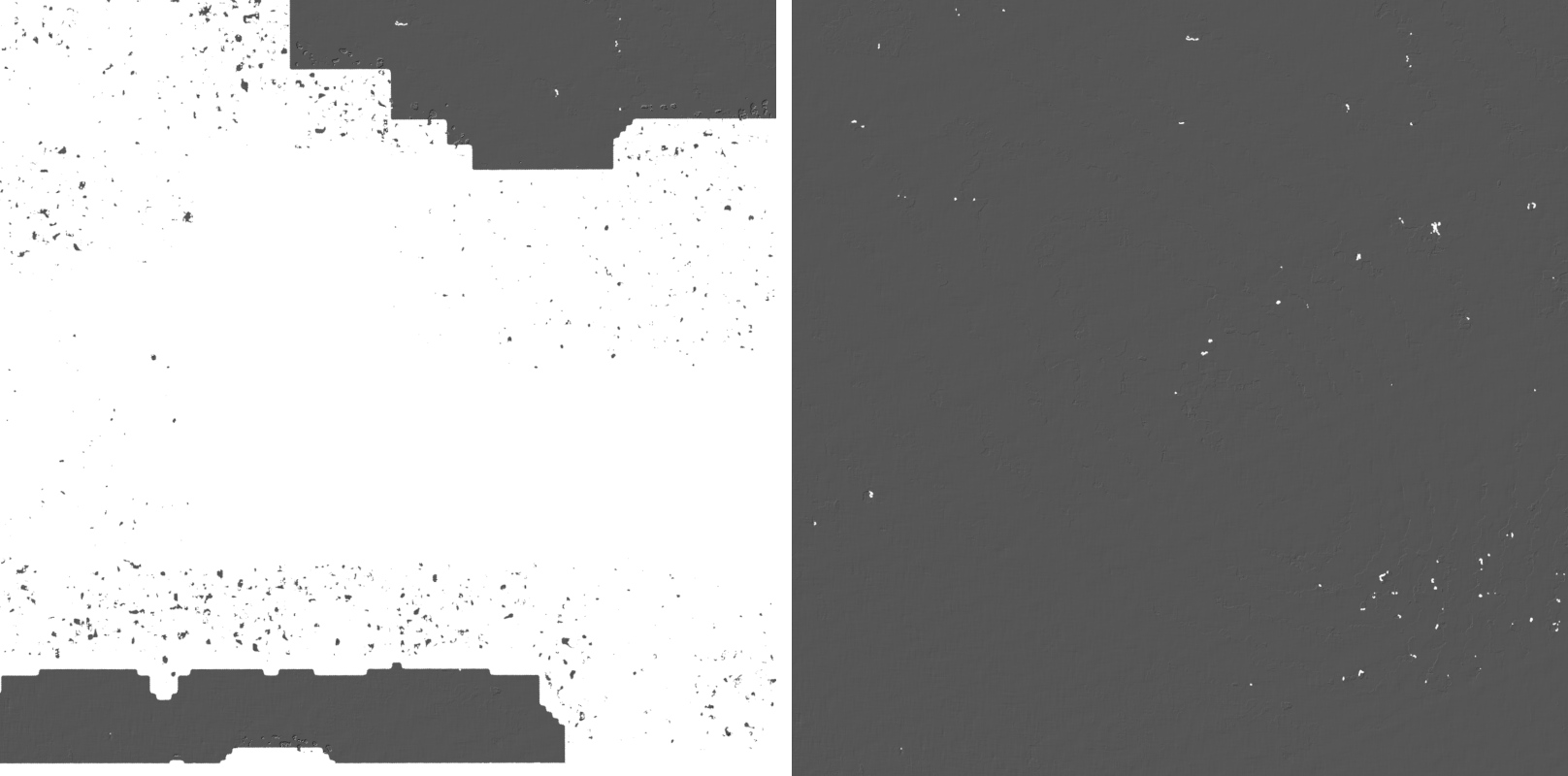
Fig. 14.3 Example of a difficult terrain obtained without (left) and with (right)
sparse_disp. (In these DEMs there is very little elevation change,
hence the flat appearance.)¶
Here is an example:
parallel_stereo -t dg --corr-seed-mode 3 \
--corr-max-levels 2 \
left_mapped.tif right_mapped.tif \
12FEB12053305-P1BS_R2C1-052783824050_01_P001.XML \
12FEB12053341-P1BS_R2C1-052783824050_01_P001.XML \
dg/dg srtm_53_07.tif
This tool can be customized with the parallel_stereo switch
--sparse-disp-options.
For installation and the full list of command-line options, see Section 16.69.
14.3.4. Skip the low-resolution disparity¶
Any large failure in the low-resolution disparity image will be detrimental to
the performance of the higher resolution disparity. In the event that the
low-resolution disparity is completely unhelpful, it can be skipped by adding
corr-seed-mode 0 in the stereo.default file and using a manual search
range (Section 14.4.2).
This should only be considered in cases where the texture in an image is
completely lost when subsampled. An example would be satellite images of fresh
snow in the Arctic. Alternatively, output_prefix-D_sub.tif can be computed
at a sparse set of pixels at full resolution, as described in
Section 14.3.3.
14.4. More on the correlation process¶
14.4.1. Debugging disparity map initialization¶
Never will all pixels be successfully matched during stereo matching. Though a good chunk of the image should be correctly processed. If you see large areas where matching failed, this could be due to a variety of reasons:
In regions where the images do not overlap, there should be no valid matches in the disparity map.
Match quality may be poor in regions of the images that have different lighting conditions, contrast, or specular properties of the surface.
Areas that have image content with very little texture or extremely low contrast may have an insufficient signal to noise ratio, and will be rejected by the correlator.
Areas that are highly distorted due to different image perspective, such as crater and canyon walls, may exhibit poor matching performance. This could also be due to failure of the preprocessing step in aligning the images. The correlator can not match images that are rotated differently from each other or have different scale/resolution. Mapprojection is used to at least partially rectify these issues (Section 6.1.7).
Bad matches, often called “blunders” or “artifacts” are also common, and can happen for many of the same reasons listed above. The Stereo Pipeline does its best to automatically detect and eliminate these blunders, but the effectiveness of these outlier rejection strategies does vary depending on the quality of the input images.
When tuning up your stereo.default file, you will find that it is
very helpful to look at the raw output of the disparity map
initialization step. This can be done using the disparitydebug tool,
which converts the output_prefix-D.tif file into a pair of normal
images that contain the horizontal and vertical components of disparity.
You can open these in a standard image viewing application and see
immediately which pixels were matched successfully, and which were not.
Stereo matching blunders are usually also obvious when inspecting these
images. With a good intuition for the effects of various
stereo.default parameters and a good intuition for reading the
output of disparitydebug, it is possible to quickly identify and
address most problems.
If you are seeing too many holes in your disparity images, one option
that may give good results is to increase the size of the correlation
kernel used by stereo_corr with the --corr-kernel option.
Increasing the kernel size will increase the processing time but should
help fill in regions of the image where no match was found.
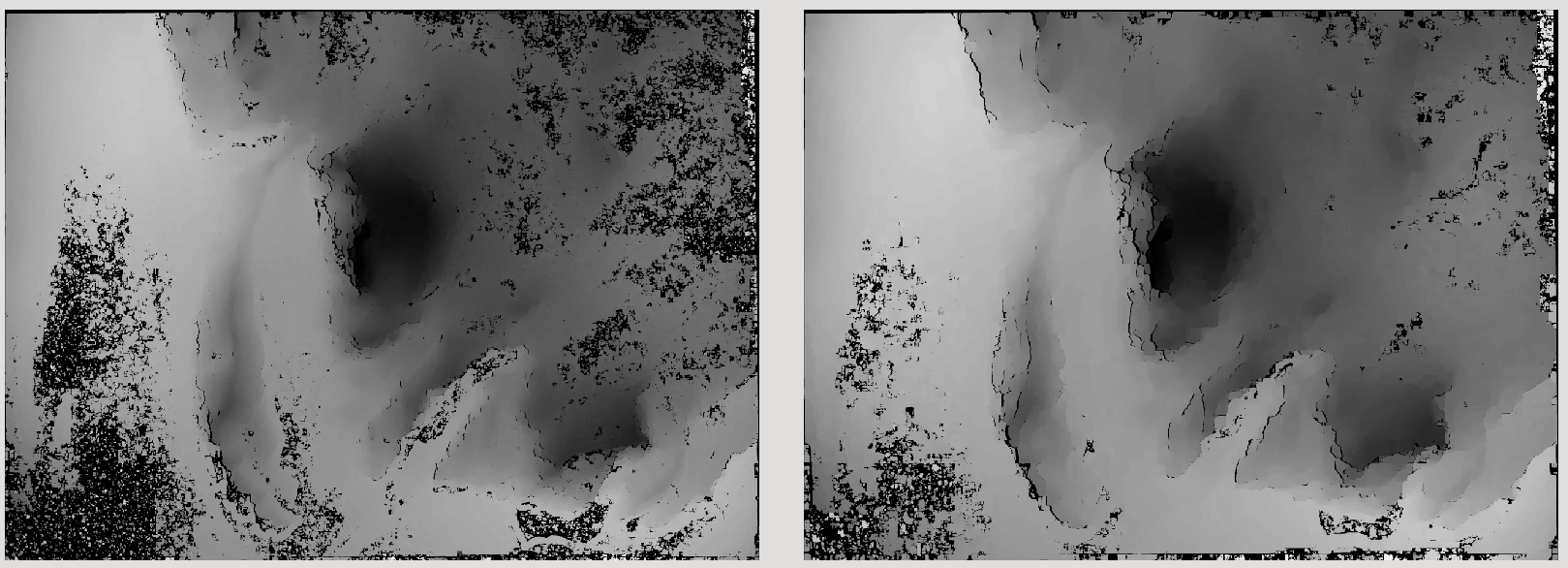
Fig. 14.4 The effect of increasing the correlation kernel size from 35 (left) to 75 (right). This location is covered in snow and several regions lack texture for the correlator to use but a large kernel increases the chances of finding useful texture for a given pixel.¶
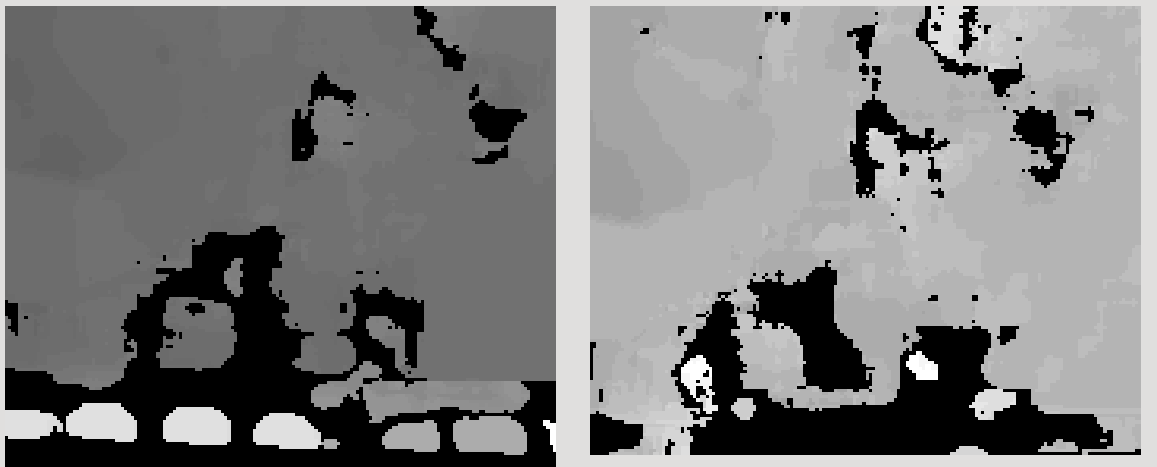
Fig. 14.5 The effect of using the rm-quantile filtering option in
stereo_corr. In the left image there are a series of high
disparity “islands” at the bottom of the image. In the right image
quantile filtering has removed those islands while leaving the rest
of the image intact.¶
14.4.2. Search range determination¶
In some circumstances, the low-resolution disparity D_sub.tif computation
may fail, or it may be inaccurate. This can happen for example if only very
small features are present in the original images, and they disappear during the
resampling that is necessary to obtain D_sub.tif.
In this case, it is possible to set corr-seed-mode from the default of 1 to
the values of 2 or 3, that will use a DEM or sample the full-resolution images
to produce a low-resolution disparity (Section 14.3).
Or, set corr-seed-mode to 0, and manually specify a search range to use for
full-resolution correlation via the parameter corr-search. In
stereo.default (Section 17) this parameter’s entry will look
like:
corr-search -80 -2 20 2
The search range can also be set on the command line (Section 6.1.5).
The exact values to use with this option you’ll have to discover yourself. These four numbers represent the horizontal minimum boundary, vertical minimum boundary, horizontal maximum boundary, and finally the horizontal maximum boundary within which we will search for the disparity during correlation.
It can be tricky to select a good search range. That’s why the best
way is to let parallel_stereo perform an automated determination.
If you think that you can do a better estimate of the search range,
take look at what search ranges stereo_corr prints in the log files
in the output directory, and examine the intermediate disparity images
using the disparitydebug program, to figure out which search
directions can be expanded or contracted. The output images will
clearly show good data or bad data depending on whether the search
range is correct.
The worst case scenario is to determine the search range manually. The
aligned L.tif and R.tif images (Section 19) can be
opened in stereo_gui (Section 16.72), and the coordinates
of points that can be matched visually can be compared. Click on a
pixel to have its coordinates printed in the terminal. Subtract row
and column locations of a feature in the first image from the
locations of the same feature in the second image, and this will yield
offsets that can be used in the search range. Make several of these
offset measurements (for example, for features at higher and then
lower elevations), and use them to define a row and column bounding
box, then expand this by 50% and use it for corr-search. This will
produce good results in most cases.
If the search range produced automatically from the low-resolution
disparity is too big, perhaps due to outliers, it can be tightened
with either --max-disp-spread or --corr-search-limit, before
continuing with full-resolution correlation (Section 17).
But note that for very steep terrains and no use of mapprojection a
large search range is expected, and tightening it too much may result
in an inaccurate disparity.
14.4.3. Correlation uncertainty¶
A measure of how reliable each correlated pixel is can be obtained from the left-right (forward-backward) disparity consistency check, which is on by default. The disparity is computed both from the left image to the right and from the right image to the left. Where the two agree, the match is reliable; weak or repetitive texture makes them disagree.
Pixels whose left-right disparity difference exceeds --xcorr-threshold
(default 2.0, Section 17.2) are filtered out as unreliable. Setting
this to a negative value disables the check, which is not recommended.
The difference itself, a per-pixel uncertainty in units of pixels, can be saved
with --save-left-right-disparity-difference (Section 17.2),
producing <output_prefix>-L-R-disp-diff.tif. Smaller values mean a more
self-consistent, more trustworthy match.
This difference is integer-valued for all algorithms, including the semi-global
ones (asp_mgm, asp_sgm; see Section 6.1.1). The
consistency check is performed on the integer disparity, before sub-pixel
refinement, because the reverse (right-to-left) disparity is only computed at
integer resolution. The difference is therefore best read as a coarse per-pixel
reliability flag: 0 means the forward and backward integer disparities agree,
while 1 or 2 means they disagree by that many pixels.
A difference of 0 does not mean the disparity is exact. Because the check is done at integer resolution, it cannot resolve a left-right disagreement smaller than about half a pixel, so an integer-consistent match may still be off by that much. A genuinely continuous per-match uncertainty would have to come from a different source, such as the curvature of the correlation cost surface at its optimum, which is not currently produced.
This per-pixel difference can also be turned into a per-match uncertainty by
image_align (Section 16.32.8), which can populate the
sigma column of its output GeoPackage with it (floored at 0.5 pixels).
14.5. Sub-pixel refinement¶
Once disparity map initialization is complete, every pixel in the
disparity map will either have an estimated disparity value, or it will
be marked as invalid. All valid pixels are then adjusted in the
sub-pixel refinement stage based on the subpixel-mode setting.
The first mode is parabola-fitting sub-pixel refinement
(subpixel-mode 1). This technique fits a 2D parabola to points on
the correlation cost surface in an 8-connected neighborhood around the
cost value that was the “best” as measured during disparity map
initialization. The parabola’s minimum can then be computed analytically
and taken as as the new sub-pixel disparity value.
This method is easy to implement and extremely fast to compute, but it exhibits a problem known as pixel-locking: the sub-pixel disparities tend toward their integer estimates and can create noticeable “stair steps” on surfaces that should be smooth [SHM06, SS03]. See for example Fig. 14.6. Furthermore, the parabola subpixel mode is not capable of refining a disparity estimate by more than one pixel, so although it produces smooth disparity maps, these results are not much more accurate than the results that come out of the disparity map initialization in the first place. However, the speed of this method makes it very useful as a “draft” mode for quickly generating a DEM for visualization (i.e. non-scientific) purposes. It is also beneficial in the event that a user will simply downsample their DEM after generation in Stereo Pipeline.
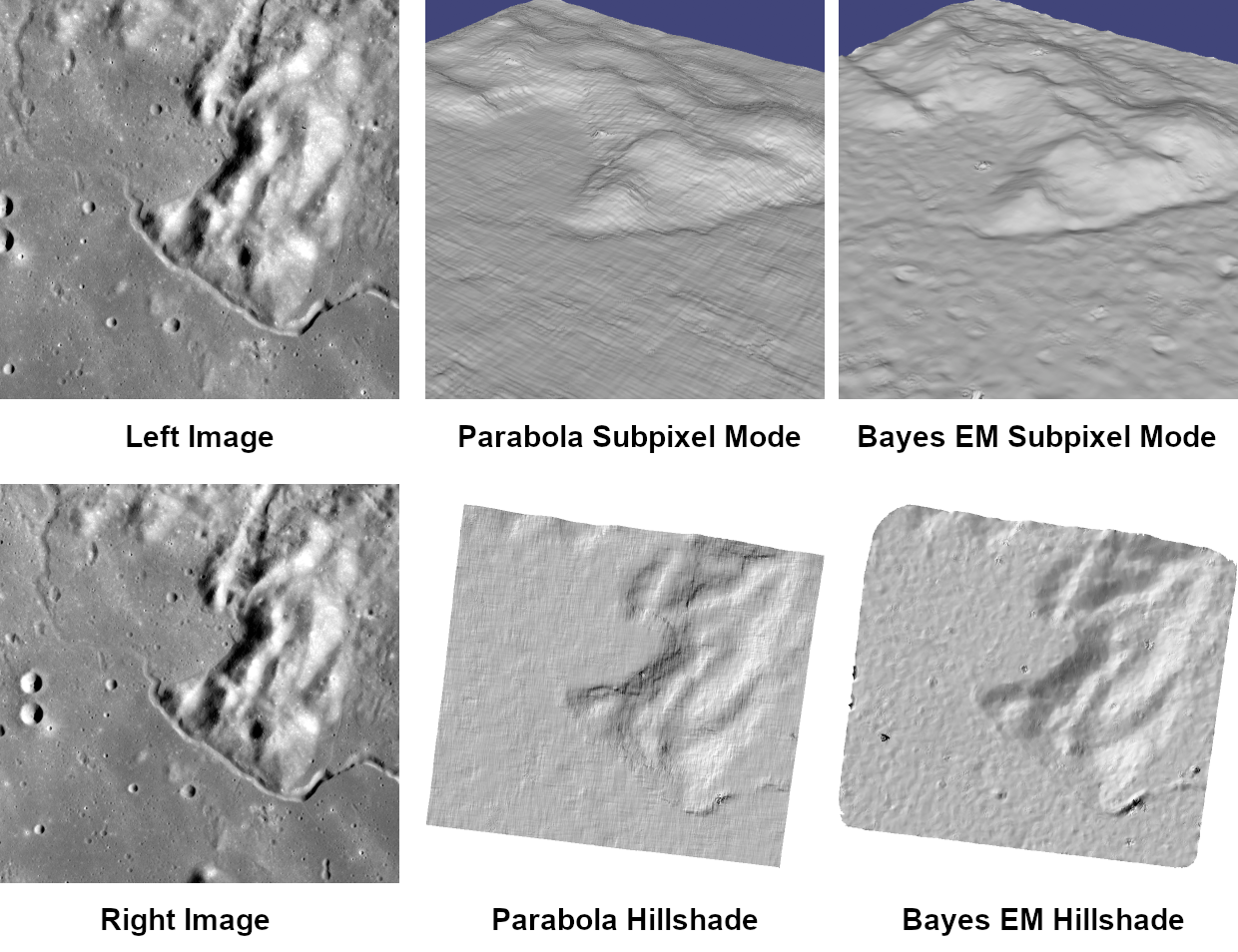
Fig. 14.6 Left: Input images. Center: results using the parabola draft subpixel mode (subpixel-mode = 1). Right: results using the Bayes EM high quality subpixel mode (subpixel-mode = 2).¶
For high quality results, we recommend subpixel-mode 2: the Bayes EM
weighted affine adaptive window correlator. This advanced method
produces extremely high quality stereo matches that exhibit a high
degree of immunity to image noise. For example Apollo Metric Camera
images are affected by two types of noise inherent to the scanning
process: (1) the presence of film grain and (2) dust and lint particles
present on the film or scanner. The former gives rise to noise in the
DEM values that wash out real features, and the latter causes incorrect
matches or hard to detect blemishes in the DEM. Attenuating the effect
of these scanning artifacts while simultaneously refining the integer
disparity map to sub-pixel accuracy has become a critical goal of our
system, and is necessary for processing real-world data sets such as the
Apollo Metric Camera data.
The Bayes EM subpixel correlator also features a deformable template window from the left image that can be rotated, scaled, and translated as it zeros in on the correct match in the right image. This adaptive window is essential for computing accurate matches on crater or canyon walls, and on other areas with significant perspective distortion due to foreshortening.
This affine-adaptive behavior is based on the Lucas-Kanade template tracking algorithm, a classic algorithm in the field of computer vision [BM04]. We have extended this technique; developing a Bayesian model that treats the Lucas-Kanade parameters as random variables in an Expectation Maximization (EM) framework. This statistical model also includes a Gaussian mixture component to model image noise that is the basis for the robustness of our algorithm. We will not go into depth on our approach here, but we encourage interested readers to read our papers on the topic [BNM+09, NHB+09].
However we do note that, like the computations in the disparity map initialization stage, we adopt a multi-scale approach for sub-pixel refinement. At each level of the pyramid, the algorithm is initialized with the disparity determined in the previous lower resolution level of the pyramid, thereby allowing the subpixel algorithm to shift the results of the disparity initialization stage by many pixels if a better match can be found using the affine, noise-adapted window. Hence, this sub-pixel algorithm is able to significantly improve upon the results to yield a high quality, high resolution result.
Another option when run time is important is subpixel-mode 3: the
simple affine correlator. This is essentially the Bayes EM mode with the
noise correction features removed in order to decrease the required run
time. In data sets with little noise this mode can yield results similar
to Bayes EM mode in approximately one fifth the time.
A different option is Phase Correlation, subpixel-mode 4, which
implements the algorithm from [GSTF08].
It is slow and does not work well on slopes but since the algorithm is
very different it might perform in situations where the other algorithms
are not working well.
14.6. Triangulation¶
When running an ISIS session, the Stereo Pipeline uses geometric camera models available in ISIS [And08]. These highly accurate models are customized for each instrument that ISIS supports. Each ISIS “cube” file contains all of the information that is required by the Stereo Pipeline to find and use the appropriate camera model for that observation.
Other sessions such as DG (DigitalGlobe) or Pinhole, require that
their camera model be provided as additional arguments to the parallel_stereo
command. Those camera models come in the form of an XML document for DG
and as *.pinhole, *.tsai, *.cahv, *.cahvor for Pinhole sessions.
Those files must be the third and forth arguments or immediately follow
after the two input images for parallel_stereo.
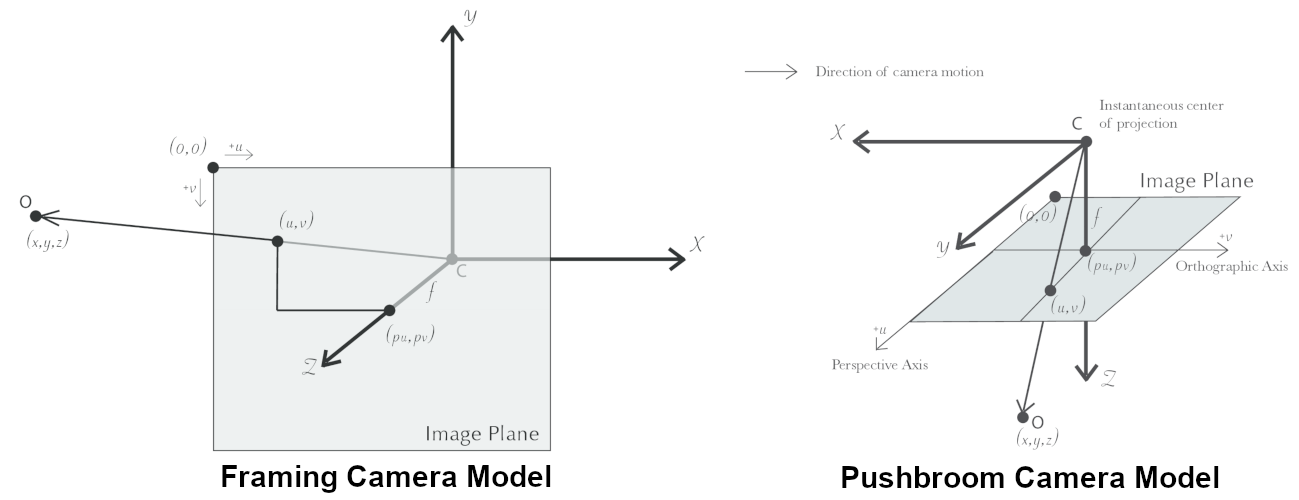
Fig. 14.7 Most remote sensing cameras fall into two generic categories based on their basic geometry. Framing cameras (left) capture an instantaneous two-dimensional image. Linescan cameras (right) capture images one scan line at a time, building up an image over the course of several seconds as the satellite moves through the sky.¶
ISIS camera models account for all aspects of camera geometry, including both intrinsic (i.e. focal length, pixel size, and lens distortion) and extrinsic (e.g. camera position and orientation) camera parameters. Taken together, these parameters are sufficient to “forward project” a 3D point in the world onto the image plane of the sensor. It is also possible to “back project” from the camera’s center of projection through a pixel corresponding to the original 3D point.
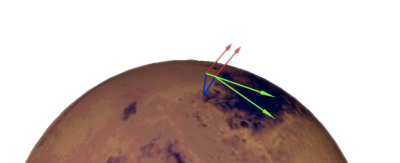
Fig. 14.8 Once a disparity map has been generated and refined, it can be used in combination with the geometric camera models to compute the locations of 3D points on the surface of Mars. This figure shows the position (at the origins of the red, green, and blue vectors) and orientation of the Mars Global Surveyor at two points in time where it captured images in a stereo pair.¶
Notice, however, that forward and back projection are not symmetric operations. One camera is sufficient to “image” a 3D point onto a pixel located on the image plane, but the reverse is not true. Given only a single camera and a pixel location \(x = (u,v),\) that is the image of an unknown 3D point \(P = (x,y,z)\), it is only possible to determine that \(P\) lies somewhere along a ray that emanates from the camera center through the pixel location \(x\) on the image plane (see Fig. 14.7).
Alas, once images are captured, the route from image pixel back to 3D points in the real world is through back projection, so we must bring more information to bear on the problem of uniquely reconstructing our 3D point. In order to determine \(P\) using back projection, we need two cameras that both contain pixel locations \(x_1\) and \(x_2\) where \(P\) was imaged. Now, we have two rays that converge on a point in 3D space (see Fig. 14.8). The location where they meet must be the original location of \(P\).
14.6.1. Triangulation error¶
In practice, the rays emanating from matching pixels in the cameras rarely intersect perfectly on the ground because any slight error in the position or pointing information of the cameras will affect the accuracy of the rays. The matching (correlation) among the images is also not perfect, contributing to the error budget. Then, we take the closest point of intersection of the two rays as the location of the intersection point \(P\).
Additionally, the actual shortest distance between the rays at this point is an interesting and important error metric that measures how self-consistent our two camera models are for this point. It will be seen in the next chapter that this information, when computed and averaged over all reconstructed 3D points, can be a valuable statistic for determining whether to carry out bundle adjustment (Section 16.5).
The distance between the two rays emanating from matching points in
the cameras at their closest intersection is recorded in the fourth
channel of the point cloud file, output-prefix-PC.tif. This is
called the triangulation error, or the ray intersection error. It
is measured in meters. This error can be gridded when a DEM is created
from the point cloud by using the --errorimage argument on the
point2dem command (Section 16.56).
This error is not the true accuracy of the DEM. It is only another indirect measure of quality. A DEM with high triangulation error, as compared to the ground sample distance, is always bad and should have its images bundle-adjusted. A DEM with low triangulation error is at least self-consistent, but could still be bad, or at least misaligned.
If, after bundle adjustment, the triangulation error is still high at the image corners and the inputs are Pinhole cameras, one may have to refine the intrinsics, including the distortion model. Section 12 discusses bundle adjustment, including optimizing the intrinsics.
To improve the location of a triangulated point cloud or created DEM relative to a known ground truth, use alignment (Section 16.53).
See Section 13 for another metric qualifying the accuracy of a point cloud or DEM, namely the horizontal and vertical uncertainty, as propagated from the input cameras.
14.6.2. Stereo with images mapprojected using ISIS¶
This is a continuation of the discussion at Section 4.2. It
describes how to mapproject the input images using the ISIS tool
cam2map and how to run stereo with the obtained
images. Alternatively, the images can be mapprojected using ASP
itself, per Section 6.1.7.
Mapprojection can result in improved results for steep slopes, when the images are taken from very different perspectives, or if the curvature of the planet/body being imaged is non-negligible.
We will now describe how this works, but we also provide the
cam2map4stereo.py program (Section 16.6) which does
this automatically.
The ISIS cam2map program will map-project these images:
ISIS> cam2map from=M0100115.cub to=M0100115.map.cub
ISIS> cam2map from=E0201461.cub to=E0201461.map.cub \
map=M0100115.map.cub matchmap=true
At this stage we can run the stereo program with map-projected images:
ISIS> parallel_stereo E0201461.map.cub M0100115.map.cub \
--alignment-method none -s stereo.default.example \
results/output
Here we have used alignment-method none since cam2map4stereo.py
brought the two images into the same perspective and using the same
resolution. If you invoke cam2map independently on the two images,
without matchmap=true, their resolutions may differ, and using an
alignment method rather than none to correct for that is still
necessary.
Now you may skip to chapter Section 6 which will discuss the
parallel_stereo program in more detail and the other tools in ASP.
Or, you can continue reading below for more details on mapprojection.
14.7. Advanced discussion of mapprojection¶
Notice the order in which the images were run through cam2map. The
first projection with M0100115.cub produced a map-projected image
centered on the center of that image. The projection of E0201461.cub
used the map= parameter to indicate that cam2map should use the
same map projection parameters as those of M0100115.map.cub
(including center of projection, map extents, map scale, etc.) in
creating the projected image. By map-projecting the image with the worse
resolution first, and then matching to that, we ensure two things: (1)
that the second image is summed or scaled down instead of being
magnified up, and (2) that we are minimizing the file sizes to make
processing in the Stereo Pipeline more efficient.
Technically, the same end result could be achieved by using the
mocproc program alone, and using its map= M0100115.map.cub
option for the run of mocproc on E0201461.cub (it behaves
identically to cam2map). However, this would not allow for
determining which of the two images had the worse resolution and
extracting their minimum intersecting bounding box (see below).
Furthermore, if you choose to conduct bundle adjustment (see
Section 12) as a pre-processing step, you would
do so between mocproc (as run above) and cam2map.
The above procedure is in the case of two images which cover similar real estate on the ground. If you have a pair of images where one image has a footprint on the ground that is much larger than the other, only the area that is common to both (the intersection of their areas) should be kept to perform correlation (since non-overlapping regions don’t contribute to the stereo solution).
ASP normally has no problem identifying the shared area and it still run well. Below we describe, for the adventurous user, some fine-tuning of this procedure.
If the image with the larger footprint size also happens to be the
image with the better resolution (i.e. the image run through
cam2map second with the map= parameter), then the above
cam2map procedure with matchmap=true will take care of it just
fine. Otherwise you’ll need to figure out the latitude and longitude
boundaries of the intersection boundary (with the ISIS camrange
program). Then use that smaller boundary as the arguments to the
MINLAT, MAXLAT, MINLON, and MAXLON parameters of the
first run of cam2map. So in the above example, after mocproc
with Mapping= NO you’d do this:
ISIS> camrange from=M0100115.cub
... lots of camrange output omitted ...
Group = UniversalGroundRange
LatitudeType = Planetocentric
LongitudeDirection = PositiveEast
LongitudeDomain = 360
MinimumLatitude = 34.079818835324
MaximumLatitude = 34.436797628116
MinimumLongitude = 141.50666207418
MaximumLongitude = 141.62534719278
End_Group
... more output of camrange omitted ...
ISIS> camrange from=E0201461.cub
... lots of camrange output omitted ...
Group = UniversalGroundRange
LatitudeType = Planetocentric
LongitudeDirection = PositiveEast
LongitudeDomain = 360
MinimumLatitude = 34.103893080982
MaximumLatitude = 34.547719435156
MinimumLongitude = 141.48853937384
MaximumLongitude = 141.62919740048
End_Group
... more output of camrange omitted ...
Now compare the boundaries of the two above and determine the
intersection to use as the boundaries for cam2map:
ISIS> cam2map from=M0100115.cub to=M0100115.map.cub \
DEFAULTRANGE=CAMERA MINLAT=34.10 MAXLAT=34.44 \
MINLON=141.50 MAXLON=141.63
ISIS> cam2map from=E0201461.cub to=E0201461.map.cub \
map=M0100115.map.cub matchmap=true
You only have to do the boundaries explicitly for the first run of
cam2map, because the second one uses the map= parameter to mimic
the map-projection of the first. These two images are not radically
different in spatial coverage, so this is not really necessary for these
images, it is just an example.
Again, unless you are doing something complicated, using the
cam2map4stereo.py (Section 16.6) will take care of
all these steps for you.
14.7.1. Identifying issues in local alignment¶
Stereo with local epipolar alignment (Section 6.1) can perform better than with global affine epipolar alignment. Yet, when stereo fails on a locally aligned tile pair, it is instructive to understand why. Usually it is because the images are difficult at that location, such as due to very steep terrain, clouds, shadows, etc.
For a completed parallel_stereo run which failed in a portion, the
first step is to identify the offending tile directory. For that, open the
produced DEM in stereo_gui, and use the instructions at
Section 16.72.8 to find the approximate longitude, latitude,
and height at the problematic location.
Then run stereo_parse with the same options as parallel_stereo
and the flag:
--tile-at-location '<lon> <lat> <height>'
This should print on the screen a text like:
Tile with location: run/run-2048_3072_1024_1024
If a run failed to complete, find the most recent output tile directories that were being worked on, based on modification time, and investigate one of them.
In either case, given a candidate for a problematic tile, from the log
file of stereo_corr in that tile’s directory you can infer the full
correlation command that failed. Re-run it, while appending the option:
--local-alignment-debug
Images and interest point matches before and after alignment will be saved. Those can be examined as:
stereo_gui <tile>-left-crop.tif <tile>-right-crop.tif \
<tile>-left-crop__right-crop.match
and:
stereo_gui <tile>-left-aligned-tile.tif \
<tile>-right-aligned-tile.tif \
<tile>-left-aligned-tile__right-aligned-tile.match
These follow the usual match-file naming convention (Section 16.5.10.1).