1. Introduction¶
The NASA Ames Stereo Pipeline (ASP) is a suite of free and open source automated geodesy and stereogrammetry tools designed for processing images captured from satellites, around Earth and other planets (Section 8), robotic rovers (Section 10.3, Section 8.12.5), aerial cameras and low-cost satellites (Section 8.27), historical images (Section 8.28), with and without accurate camera pose information.
It has functionality for 3D terrain creation from stereo (Section 3), alignment of point clouds (Section 16.53), structure-from-motion (Section 9.1), shape-from-shading (Section 11.1), bundle adjustment (Section 16.5), solving for jitter (Section 16.38), rig calibration (Section 16.60), refining camera intrinsics (Section 12.2.1), GCP generation (Section 16.24, Section 16.18), and a versatile GUI shell (Section 16.71).
ASP produces cartographic products, including digital terrain models (DTMs) and ortho-projected images (Section 6.2.2), 3D models (Section 16.58), textured meshes (Section 10.2), and bundle-adjusted networks of cameras (Section 16.5.10).
ASP’s data products are suitable for science analysis, mission planning, and public outreach.
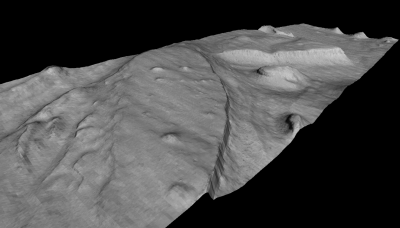
Fig. 1.1 This 3D model was generated from a image pair M01/00115 and E02/01461 (34.66N, 141.29E). The complete stereo reconstruction process takes approximately thirty minutes on a 3.0 GHz workstation for input images of this size (1024 × 8064 pixels). This model, shown here without vertical exaggeration, is roughly 2 km wide in the cross-track dimension.¶
1.1. Background¶
The Intelligent Robotics Group (IRG) at the NASA Ames Research Center has been developing 3D surface reconstruction and visualization capabilities for planetary exploration for more than a decade. First demonstrated during the Mars Pathfinder Mission, the IRG has delivered tools providing these capabilities to the science operations teams of the MPL mission, the MER mission, the MRO mission, and the LRO mission. A critical component technology enabling this work is the ASP. The Stereo Pipeline generates high quality, dense, texture-mapped 3D surface models from stereo image pairs. In addition, ASP provides tools to perform many other cartography tasks including map projection, point cloud and DEM registration, automatic registration of cameras, data format conversion, and data visualization.
Although initially developed for ground control and scientific visualization applications, the Stereo Pipeline has evolved to address orbital stereogrammetry and cartographic applications. In particular, long-range mission planning requires detailed knowledge of planetary topography, and high resolution topography is often derived from stereo pairs captured from orbit. Orbital mapping satellites are sent as precursors to planetary bodies in advance of landers and rovers. They return a wealth of images and other data that helps mission planners and scientists identify areas worthy of more detailed study. Topographic information often plays a central role in this planning and analysis process.
Our recent development of the Stereo Pipeline coincides with a period of time when NASA orbital mapping missions are returning orders of magnitude more data than ever before. Data volumes from the Mars and Lunar Reconnaissance Orbiter missions now measure in the tens of terabytes. There is growing consensus that existing processing techniques, which are still extremely human intensive and expensive, are no longer adequate to address the data processing needs of NASA and the Planetary Science community. To pick an example of particular relevance, the HiRISE instrument has captured a few thousand stereo pairs. Of these, only about two hundred stereo pairs have been processed to date; mostly on human-operated, high-end photogrammetric workstations. It is clear that much more value could be extracted from this valuable raw data if a more streamlined, efficient process could be developed.
The Stereo Pipeline was designed to address this very need. By applying recent advances in computer vision, we have created an automated process that is capable of generating high quality DTMs with minimal human intervention. Users of the Stereo Pipeline can expect to spend some time picking a handful of settings when they first start processing a new type of image, but once this is done, the Stereo Pipeline can be used to process tens, hundreds, or even thousands of stereo pairs without further adjustment. With the release of this software, we hope to encourage the adoption of this tool chain at institutions that run and support these remote sensing missions. Over time, we hope to see this tool incorporated into ground data processing systems alongside other automated image processing pipelines. As this tool continues to mature, we believe that it will be capable of producing digital elevation models of exceptional quality without any human intervention.
1.2. Human vs. Computer: When to Choose Automation?¶
When is it appropriate to choose automated stereo mapping over the use of a conventional, human-operated photogrammetric workstation? This is a philosophical question with an answer that is likely to evolve over the coming years as automated data processing technologies become more robust and widely adopted. For now, our opinion is that you should always rely on human-guided, manual data processing techniques for producing mission critical data products for missions where human lives or considerable capital resources are at risk. In particular, maps for landing site analysis and precision landing absolutely require the benefit of an expert human operator to eliminate obvious errors in the DEMs, and also to guarantee that the proper procedures have been followed to correct satellite telemetry errors so that the data have the best possible geodetic control.
When it comes to using DTMs for scientific analysis, both techniques have their merits. Human-guided stereo reconstruction produces DTMs of unparalleled quality that benefit from the intuition and experience of an expert. The process of building and validating these DTMs is well-established and accepted in the scientific community.
However, only a limited number of DTMs can be processed to this level of quality. For the rest, automated stereo processing can be used to produce DTMs at a fraction of the cost. The results are not necessarily less accurate than those produced by the human operator, but they will not benefit from the same level of scrutiny and quality control. As such, users of these DTMs must be able to identify potential issues, and be on the lookout for errors that may result from the improper use of these tools.
We recommend that all users of the Stereo Pipeline take the time to thoroughly read this documentation and build an understanding of how stereo reconstruction and bundle adjustment can be best used together to produce high quality results. You are welcome to contact us if you have any questions (Section 1.4).
1.3. Software foundations¶
1.3.1. NASA Vision Workbench¶
The Stereo Pipeline is built upon the Vision Workbench software which is a general purpose image processing and computer vision library also developed by the IRG. Some of the tools discussed in this document are actually Vision Workbench programs, and any distribution of the Stereo Pipeline requires the Vision Workbench. This distinction is important only if compiling this software.
1.3.2. The USGS Integrated Software for Imagers and Spectrometers¶
For processing non-terrestrial NASA satellite images, Stereo Pipeline must be installed alongside a copy of the Integrated Software for Imagers and Spectrometers (ISIS). ISIS is however not required for processing terrestrial images (DigitalGlobe/Maxar WorldView, etc.).
ISIS is widely used in the planetary science community for processing raw spacecraft images into high level data products of scientific interest such as map-projected and mosaicked images [USGS09, AndersonSidesSoltesz+04, GaddisAndersonBecker+97]. We chose ISIS because (1) it is widely adopted by the planetary science community, (2) it contains the authoritative collection of geometric camera models for planetary remote sensing instruments, and (3) it is open source software that is easy to leverage.
By installing the Stereo Pipeline, you will be adding an advanced stereo
image processing capability that can be used in your existing ISIS workflow.
The Stereo Pipeline supports the ISIS cube (.cub) file format, and can
make use of the camera models and ancillary information (i.e. SPICE
kernels) for imagers on many NASA spacecraft. The use of this single
standardized set of camera models ensures consistency between products
generated in the Stereo Pipeline and those generated by ISIS. Also by
leveraging ISIS camera models, the Stereo Pipeline can process stereo pairs
captured by just about any NASA mission.
1.4. Getting help and reporting bugs¶
All bugs, feature requests, and general discussion should be posted on the ASP support forum:
To contact the developers and project manager directly, send an email to:
When you submit a bug report, it may be helpful to attach the logs
output by parallel_stereo and other tools (Section 2.6.2).
1.5. Typographical conventions¶
Names of programs that are meant to be run on the command line are
written in a constant-width font, like the parallel_stereo program, as are
options to those programs.
An indented line of constant-width text can be typed into your terminal,
these lines will either begin with a ‘>’ to denote a regular shell,
or with ‘ISIS>’ which denotes an ISIS-enabled shell (which means you have
to set the ISISROOT environment variable and have sourced the appropriate
ISIS startup script, as detailed in the ISIS instructions).
> ls
ISIS> pds2isis
Constant-width text enclosed in greater-than and less-than brackets denotes an
option or argument that a user will need to supply. For example,
‘stereo E0201461.map.cub M0100115.map.cub out’ is specific, but
‘stereo <left-image> <right-image> out’ indicates that <left-image>
and <right-image> are not the names of specific files, but dummy
parameters which need to be replaced with actual file names.
Square brackets denote optional options or values to a command, and items separated by a vertical bar are either aliases for each other, or different, specific options. Default arguments or other notes are enclosed by parentheses, and line continuation with a backslash:
point2dem [-h|--help] [-r moon|mars] [-s <float(default: 0.0)>] \
[-o <output prefix>] <output prefix>-PC.tif
The above indicates a run of the point2dem program. The only
argument that it requires is a point cloud file, which is produced by
the parallel_stereo program and ends in -PC.tif, although its prefix
could be anything (hence the greater-than and less-than enclosing brackets).
Everything else is in square brackets indicating that they are optional.
Here, --help and -h refer to the same thing. Similarly, the
argument to the -r option must be either moon or mars. The
-s option takes a floating point value as its argument, and has a
default value of zero. The -o option takes a filename that will be
used as the output DTM.
Although there are two lines of constant-width text, the backslash at the end of the first line indicates that the command continues on the second line. You can either type everything into one long line on your own terminal, or use the backslash character and a return to continue typing on a second line in your terminal.
1.6. Citing the Ames Stereo Pipeline in your work¶
In general, use this reference:
Beyer, Ross A., Oleg Alexandrov, and Scott McMichael. 2018. The Ames Stereo Pipeline: NASA’s open source software for deriving and processing terrain data. Earth and Space Science, 5. https://doi.org/10.1029/2018EA000409.
If you are using ASP for application to Earth images, or need a reference which details the quality of output, then we suggest also referencing:
Shean, D. E., O. Alexandrov, Z. Moratto, B. E. Smith, I. R. Joughin, C. C. Porter, Morin, P. J. 2016. An automated, open-source pipeline for mass production of digital elevation models (DEMs) from very high-resolution commercial stereo satellite imagery. ISPRS Journal of Photogrammetry and Remote Sensing. 116.
In addition to using the references above, in order to help you better cite the specific version of ASP that you are using in a work, as of ASP version 2.6.0, we have started using Zenodo to create digital object identifiers (DOIs) for each ASP release. For example, the DOI for version 2.6.2 is 10.5281/zenodo.3247734, and you can cite it like this:
Beyer, Ross A., Oleg Alexandrov, and Scott McMichael. 2019. NeoGeographyToolkit/StereoPipeline: Ames Stereo Pipeline version 2.6.2. Zenodo. DOI: 10.5281/zenodo.3247734.
Of course, every new release of ASP will have its own unique DOI, and this link should always point to the latest DOI for ASP.
If you publish a paper using ASP, please let us know. We’ll cite your work in this document, in Section 22.
1.7. Warnings to users of the Ames Stereo Pipeline¶
Ames Stereo Pipeline is a research product. There may be bugs or incomplete features. We reserve the ability to change the API and command line options of the tools we provide. Although we hope you will find this release helpful, you use it at your own risk.
While we are confident that the algorithms used by this software are robust, the Ames Stereo Pipeline has a lot of adjustable parameters, and even experienced operators can produce poor results. We strongly recommend that if you have any concerns about the products that you (or others) create with this software, please just get in contact with us. We can help you figure out either how to make the product better, or help you accurately describe the limitations of the data or the data products, so that you can use it to confidently make new and wonderful discoveries.
Please check each release’s NEWS file (Section 23) to see a summary of our recent changes.