10.3. MSL navcam example¶
This is an example of using the ASP tools to process images taken by the Mars Science Laboratory (MSL) rover Curiosity. See Section 10 for other examples.
This approach uses the images to create a self-consistent solution, which can be registered to the ground (Section 10.3.10).
Section 8.12.5 discusses using the known camera poses for MSL.
10.3.1. Illustration¶
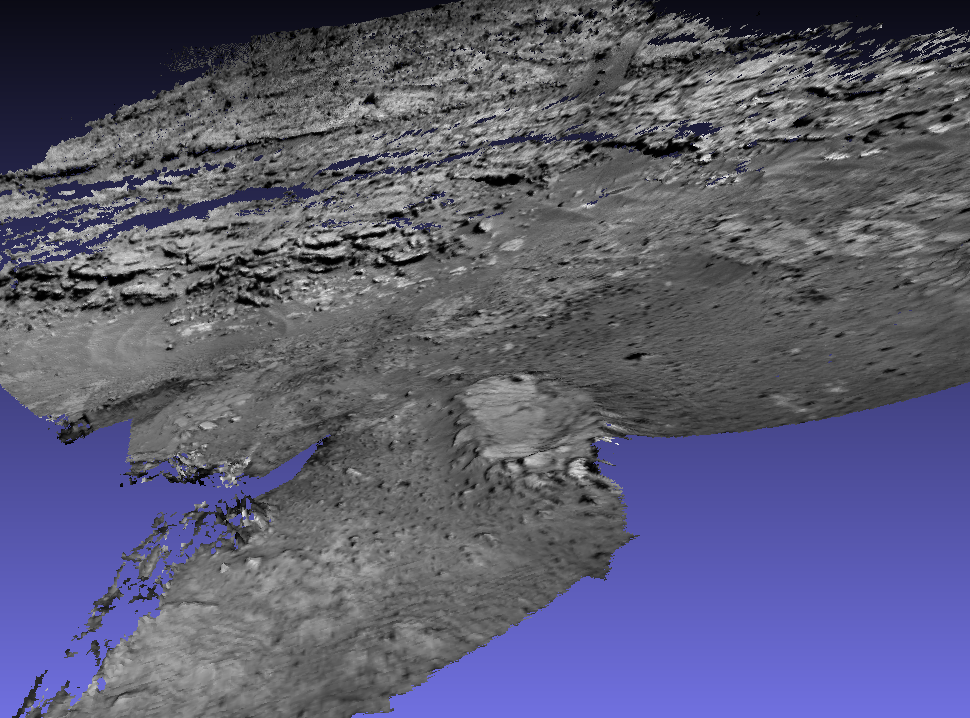
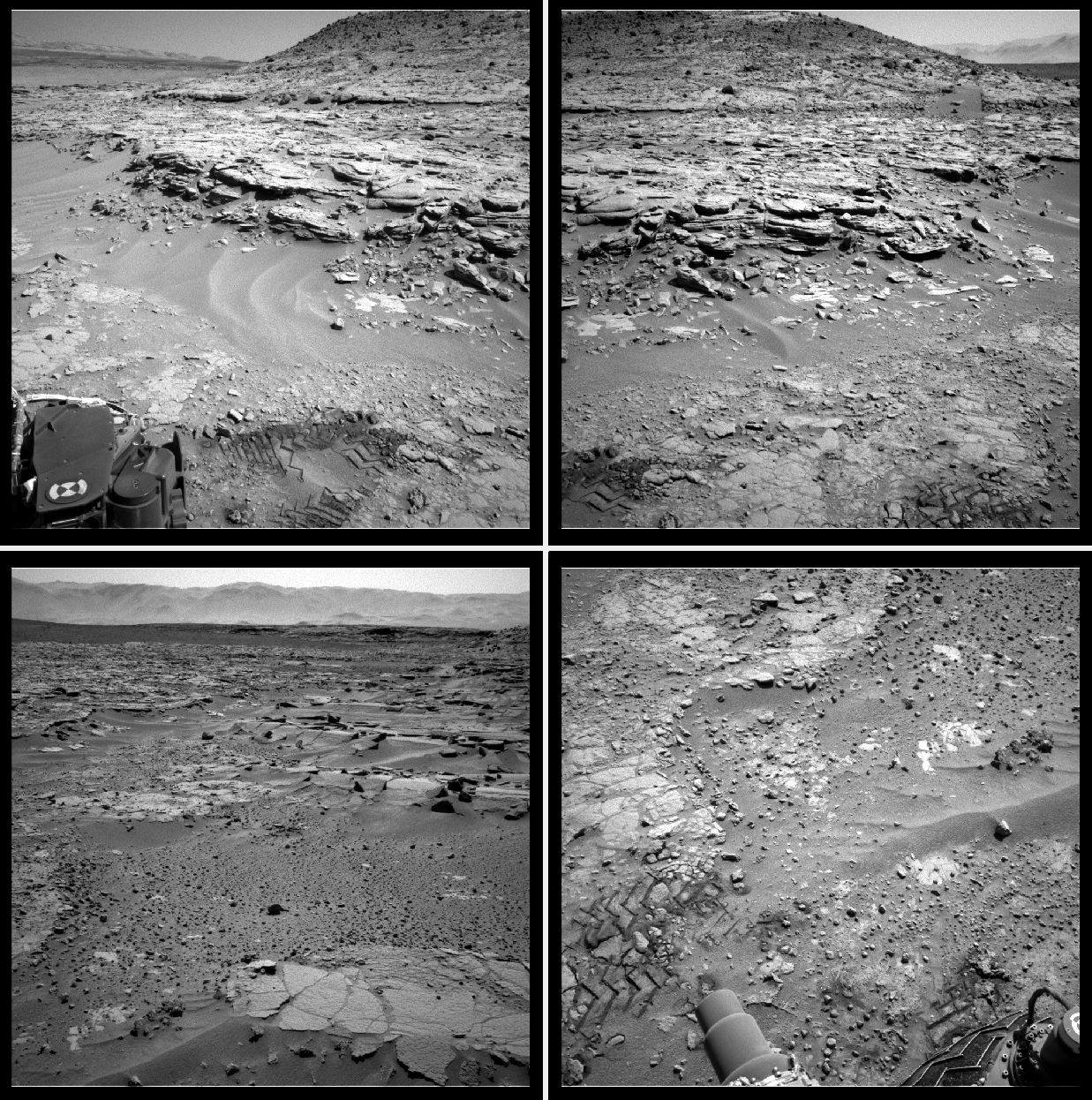
Fig. 10.2 A mesh created with 22 MSL navcam images acquired on SOL 597 (top), and several representative images from this set (bottom).¶
10.3.2. Sensor information¶
Curiosity has two navcam sensors (left and right) mounted on a stereo rig. Each records images at a resolution of 1024 x 1024 pixels. The field of view is 45 degrees.
10.3.3. Challenges¶
The navcam images are used to plan the path of the rover. They are not acquired specifically for mapping. While there is good overlap and perspective difference between images that are taken at the same time with the stereo rig, these assumptions may not hold for images produced at different times. Moreover, after the rover changes position, there is usually a large perspective difference and little overlap with earlier images.
10.3.4. Prior work¶
A very useful reference on processing MSL images is [CLMouelicM+20]. It uses the commercial Agisoft Photoscan software. To help with matching the images, that paper uses the global position and orientation of each image and projects these onto the ground. Such data is not fully present in the .LBL files in PDS, as those contain only local coordinates, and would necessitate queering the SPICE database. It also incorporates lower-resolution “TRAV” images to tie the data together.
10.3.5. Data preparation¶
The images are fetched from PDS. For example, to get the data for day (SOL) 597 on Mars, use the command:
dir=data/msl/MSLNAV_0XXX/DATA/SOL00597
wget -r -nH --cut-dirs=4 --no-parent \
--reject="index.html*" \
https://pds-imaging.jpl.nasa.gov/$dir \
--include $dir
This will create the directory SOL00597 containing .IMG data files
and .LBL metadata. Using the ISIS pds2isis program (see
Section 2.3.1 for installation), these can be converted to
.cub files as:
pds2isis from = SOL00597/image.LBL to = SOL00597/image.cub
A .cub file obtained with the left navcam sensor will have a name like:
SOL00597/NLB_451023553EDR_F0310946NCAM00492M1.cub
while for the right sensor the prefix will be instead NRB. The
full-resolution images have _F as part of their name, as above.
We will convert the .cub files to the TIF format so that they can be understood
by theia_sfm. The rig_calibrator convention will be used, of storing
each sensor’s data in its own subdirectory (Section 16.60.2). We will
name the left and right navcam sensors lnav and rnav. Then, the
conversion commands are along the lines of:
mkdir -p SOL00597/lnav
isis2std from = SOL00597/left_image.cub \
to = SOL00597/lnav/left_image.tif
Each produced image will have a timestamp, with the same value for the left and right navcam images taken at the same time.
10.3.6. Image selection¶
A subset of 22 images was selected for SOL 597 (half for each of the left and right navcam sensors). Images were chosen based on visual inspection. A fully automatic approach may be challenging (Section 10.3.3).
This dataset is available for download.
10.3.7. Setting up the initial rig¶
Given the earlier sensor information, the focal length can be found using the formula:
where \(w\) is sensor width in pixels and \(\theta\) is the field of view. The focal length is then about 1236.0773 pixels. We will start by assuming that the optical center is at the image center, and no distortion. Hence, the initial rig configuration (Section 16.60.4) will look like:
ref_sensor_name: lnav
sensor_name: lnav
focal_length: 1236.0773
optical_center: 512 512
distortion_coeffs:
distortion_type: no_distortion
image_size: 1024 1024
distorted_crop_size: 1024 1024
undistorted_image_size: 1024 1024
ref_to_sensor_transform: 1 0 0 0 1 0 0 0 1 0 0 0
depth_to_image_transform: 1 0 0 0 1 0 0 0 1 0 0 0
ref_to_sensor_timestamp_offset: 0
with an additional identical block for the rnav sensor (without
ref_sensor_name).
10.3.8. SfM map creation¶
Given the data and rig configuration, the image names in .tif format
were put in a list, with one entry per line. The theia_sfm
program (Section 16.76) was run to find initial camera poses:
theia_sfm \
--rig-config rig_config.txt \
--image-list list.txt \
--out-dir theia_rig
Next, rig_calibrator (Section 16.60) is used, to
enforce the rig constraint between the left and right navcam sensors
and refine the intrinsics:
params="focal_length,optical_center"
float="lnav:${params} rnav:${params}"
rig_calibrator \
--rig-config rig_config.txt \
--nvm theia_rig/cameras.nvm \
--camera-poses-to-float "lnav rnav" \
--intrinsics-to-float "$float" \
--num-iterations 100 \
--num-passes 2 \
--num-overlaps 5 \
--out-dir rig_out
To optimize the distortion, one can adjust the rig configuration by setting initial distortion values and type:
distortion_coeffs: 1e-8 1e-8 1e-8 1e-8 1e-8
distortion_type: radtan
and then defining the list of parameters to optimize as:
params="focal_length,optical_center,distortion"
For this example, plausible solutions were obtained with and without using distortion modeling, but likely for creation of pixel-level registered textured meshes handling distortion is important.
The produced pairwise matches in rig_out/cameras.nvm can be
inspected with stereo_gui (Section 16.72.9.4).
10.3.9. Mesh creation¶
Here, a point cloud is created from every stereo pair consisting of a left sensor image and corresponding right image, and those are fused into a mesh. Some parameters are set up first.
Stereo options (Section 17):
stereo_opts="
--stereo-algorithm asp_mgm
--alignment-method affineepipolar
--ip-per-image 10000
--min-triangulation-angle 0.1
--global-alignment-threshold 5
--session nadirpinhole
--no-datum
--corr-seed-mode 1
--max-disp-spread 300
--ip-inlier-factor 0.4
--nodata-value 0"
Point cloud filter options (Section 16.54):
maxDistanceFromCamera=100.0
pc_filter_opts="
--max-camera-ray-to-surface-normal-angle 85
--max-valid-triangulation-error 10.0
--max-distance-from-camera $maxDistanceFromCamera
--blending-dist 50 --blending-power 1"
Mesh generation options (Section 16.79):
mesh_gen_opts="
--min_ray_length 0.1
--max_ray_length $maxDistanceFromCamera
--voxel_size 0.05"
Set up the pairs to run stereo on:
outDir=stereo
mkdir -p ${outDir}
grep lnav list.txt > ${outDir}/left.txt
grep rnav list.txt > ${outDir}/right.txt
The optimized rig, in rig_out/rig_config.txt, and optimized
cameras, in rig_out/cameras.txt, are passed to multi_stereo
(Section 16.42):
multi_stereo \
--rig_config rig_out/rig_config.txt \
--camera_poses rig_out/cameras.txt \
--undistorted_crop_win '1100 1100' \
--rig_sensor "lnav rnav" \
--first_step stereo \
--last_step mesh_gen \
--stereo_options "$stereo_opts" \
--pc_filter_options "$pc_filter_opts" \
--mesh_gen_options "$mesh_gen_opts" \
--left ${outDir}/left.txt \
--right ${outDir}/right.txt \
--out_dir ${outDir}
This created:
${outDir}/lnav_rnav/fused_mesh.ply
See the produced mesh in Section 10.3.1.
10.3.10. Ground registration¶
To create DEMs, for example for rover cameras, the cameras should be registered to the ground. We will discuss how to do that both when a prior DEM is available and when not. For registration to a local Cartesian coordinate system, see instead Section 16.60.11.
10.3.10.1. Invocation of bundle adjustment¶
The rig_calibrator option --save_pinhole_cameras can export the camera
poses to Pinhole format (Section 20.1). It will also save the list of
input images (Section 16.60.15).
These can be ingested by ASP’s bundle adjustment program
(Section 16.5). It can transform the cameras to ground coordinates
using ground control points (GCP, Section 16.5.9), with the option
--transform-cameras-with-shared-gcp.
Here is an example invocation:
bundle_adjust \
--image-list rig_out/image_list.txt \
--camera-list rig_out/camera_list.txt \
--nvm rig_out/cameras.nvm \
--num-iterations 0 \
--inline-adjustments \
--datum D_MARS \
--remove-outliers-params "75 3 50 50" \
--transform-cameras-with-shared-gcp \
gcp1.gcp gcp2.gcp gcp3.gcp \
-o ba/run
The --datum option is very important, and it should be set depending
on the planetary body.
Using zero iterations will only apply the registration transform, and will preserve the rig structure, up to a scale factor.
With a positive number of iterations, the cameras will be further refined in bundle adjustment, while using the GCP. For such refinement it is important to have many interest point matches between the images. This will not preserve the rig structure.
We used high values in --remove-outliers-params to avoid removing valid
features in the images if there is unmodeled distortion.
See Section 16.5.11.5 for a report file that measures reprojection errors, including for GCP. It is very important to examine those. They should be less than a few dozen pixels, and ideally less.
With the cameras correctly registered and self-consistent, dense stereo point clouds and DEMs can be created (Section 6), that can be mosaicked (Section 16.20) and aligned to a prior dataset (Section 16.53).
For difficult areas with few interest points matches, the images (with cameras now in planetary coordinates) can be mapprojected, and the resulting images can be used to find many more interest points (Section 12.2.4.3).
10.3.10.2. Use of registered data with rig_calibrator¶
The bundle_adjust program will produce the file ba/run.nvm having
the registered camera positions and the control network. This can be passed
back to rig_calibrator, if needed, together with the latest optimized rig,
which is at rig_out/rig_config.txt. The command is:
rig_calibrator \
--rig-config rig_out/rig_config.txt \
--nvm ba/run.nvm \
--camera-poses-to-float "lnav rnav" \
--intrinsics-to-float "$float" \
--num-iterations 100 \
--num-passes 2 \
--num-overlaps 0 \
--out-dir rig_out_reg
Here we set --num_overlaps 0 as we do not want to try to create interest
point matches again.
10.3.10.3. GCP and custom DEM creation¶
GCP files can be created manually by point-and-click in stereo_gui
(Section 16.72.12) or automatically (Section 16.24), if a prior DEM
and/or orthoimage are available.
If no prior DEM is available, it is possible to tie several features in the
images to made-up ground points. For example, consider a ground box with given
width and height, in meters, such as 10 x 4 meters. Create a CSV file named
ground.csv of the form:
# x (meters) y(meters) height (meters)
0 0 0
10 0 0
10 4 0
0 4 0
This can be made into a DEM with point2dem (Section 16.56):
proj="+proj=stere +lat_0=0 +lat_ts=0 +lon_0=0 +k=1 +x_0=0 +y_0=0 +a=3396190 +b=3396190 +units=m +no_defs"
format="1:northing,2:easting,3:height_above_datum"
point2dem \
--datum D_MARS \
--csv-format "$format" \
--csv-srs "$proj" \
--t_srs "$proj" \
--tr 0.1 \
--search-radius-factor 0.5 \
ground.csv
Ensure the correct planet radii and datum are used. The projection can be auto-determined (Section 16.56.1).
Then, following the procedure Section 16.72.12, features can be picked in the images and tied to some of the corners of this box, creating GCP files, which are then used as earlier.
Multiple subsets of the images can be used, with each producing a GCP file.
All can then be passed together to bundle_adjust.
10.3.10.4. Validation of registered DEMs¶
Solving for both intrinsics and camera poses is a complex nonlinear problem, that may have more than one solution. It is strongly suggested to compare the produced individual DEMs (after alignment, Section 16.53) to a trusted DEM, even if at a lower resolution.
In case of horizontal misalignment, it is suggested to individually align the
produced DEMs to the prior DEM, apply the alignment transform to the cameras
(Section 16.53.14), then redo the bundle-adjustment with the aligned
cameras and the prior DEM as a constraint (Section 12.2.2), while refining
the intrinsics. It is suggested to use a value of --heights-from-dem-uncertainty
maybe as low as 0.1 or 0.01, if desired to fit tightly to the prior DEM. This may come,
however, at the cost of internal consistency.
The triangulation error for each DEM (Section 16.56) can help evaluate the
accuracy of the intrinsics. The geodiff program (Section 16.26), can be
used to assess the vertical agreement between DEMs.
For cases when the ASP-produced DEMs have remaining strong differences with the
prior DEM, use the dem2gcp program (Section 16.18) to create GCPs to help
correct this. One GCP file can be produced for each stereo pair, and then all
can be passed to bundle_adjust.

Fig. 10.3 A DEM measured with a point cloud scanner (top) and a mosaicked DEM produced
with ASP (bottom), that was carefully validated with the measured DEM. Data
acquired in the Regolith Testbed
at NASA Ames. The noise in the upper-left corner is due to an occluding light
source. Other sources of noise are because of shadows. The asp_bm algorithm was
used (Section 6.1.1), which is one of the older algorithms in ASP.¶
10.3.11. Notes¶
The voxel size for binning and meshing the point cloud was chosen manually. An automated approach for choosing a representative voxel size is to be implemented.
The
multi_stereoprogram does not use the interest points found during SfM map construction. That would likely result in a good speedup. It also does not run the stereo pairs in parallel.