8.7. Lunar Reconnaissance Orbiter (LRO) NAC¶
This section will describe in detail how to process an LRO NAC dataset. (See also Section 4.1 for a ready-made example using a different dataset for which all inputs have already been prepared.)
8.7.1. The site¶
In this example we will consider a stereo pair that covers the Taurus-Littrow valley on the Moon where, on December 11, 1972, the astronauts of Apollo 17 landed. However, this stereo pair does not contain the landing site. It is slightly west; focusing on the Lee-Lincoln scarp that is on North Massif. The scarp is an 80 m high feature that is the only visible sign of a deep fault.
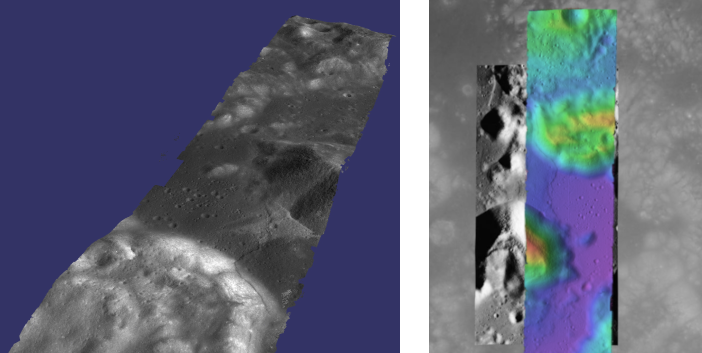
Fig. 8.5 Example output possible with a LROC NA stereo pair, using both CCDs from each observation, courtesy of the lronac2mosaic.py tool.¶
8.7.2. LRO NAC camera design¶
LRO has two Narrow Angle Cameras (NAC), with both acquiring image data
at the same time, so each observation consists
of two images, left and right, denoted with L and R.
These are not meant to be used as a stereo pair, as the camera
center is virtually in the same place for both, and they have very little
overlap. For stereo one needs two such observations, with a
reasonable perspective difference (baseline) among the two.
Then stereo can happen by pairing an L or R image from the first observation with an L or R image from the second. Alternatively, each observation’s L and R images can be stitched first, then stereo happens between the two stitched images. Both of these approaches will be discussed below.
8.7.3. Download¶
Download the experimental data records (EDR) for observations M104318871 and M104311715 from http://wms.lroc.asu.edu/lroc/search. Alternatively, search by original IDs of 2DB8 and 4C86 in the PDS.
The download will result in four files, named M104318871LE.img, M104318871RE.img, M104311715LE.img, and M104311715RE.img.
8.7.4. Preparing the inputs without stitching¶
The individual L and R images in an LRO NAC observation can be
used without stitching if desired to keep the original camera models.
Unstitched cameras can also be converted to CSM (Section 8.12), which
will provide a great speed up for stereo, bundle adjustment, and
Shape-from-Shading (Section 11.1).
We convert each .img file to an ISIS .cub camera image, initialize the SPICE kernels, and perform radiometric calibration and echo correction. Here are the steps, illustrated on one image:
f=M104318871LE
lronac2isis from = ${f}.IMG to = ${f}.cub
spiceinit from = ${f}.cub
lronaccal from = ${f}.cub to = ${f}.cal.cub
lronacecho from = ${f}.cal.cub to = ${f}.cal.echo.cub
Note that for these commands to succeed, ISIS and its supporting data must be downloaded, per Section 2.3.1.
8.7.5. Stitching the LE and RE observations¶
In this case all ISIS preprocessing of the EDRs is performed via the
lronac2mosaic.py command (Section 16.39):
lronac2mosaic.py M104318871LE.img M104318871RE.img
lronac2mosaic.py M104311715LE.img M104311715RE.img
This runs lronac2isis, lronaccal, lronacecho,
spiceinit, noproj, and handmos to create a stitched
unprojected image for each observation. In this example we don’t
mapproject the images as ASP can usually get good results. More
aggressive terrain might require an additional cam2map4stereo.py
step.
In case of failure, it is suggested to re-run this tool with the option
--keep to keep the intermediate files, and then inspect the ones before
the final step.
8.7.6. Running stereo¶
Stereo can then be run either with unstitched or stitched .cub files. Here’s an example with the unstitched LE images:
parallel_stereo M104318871LE.cub M104311715LE.cub \
--alignment-method affineepipolar \
run/run
Create a DEM, orthoimage, and error image with point2dem
(Section 16.56):
point2dem --stereographic --auto-proj-center \
--errorimage --orthoimage \
run/run-PC.tif run/run-L.tif
Check the stereo convergence angle as printed during preprocessing (Section 8.1). That angle is often too small for LRO NAC, and then the results are not going to be great.
Check the triangulation error (Section 14.6.1) in the produced error image. This may suggest that bundle adjustment may be needed (Section 16.5).
See Section 6 for a discussion about various stereo speed-vs-quality choices. Consider using mapprojection (Section 6.1.7) for best results for steep slopes.
It is strongly suggested to convert the cameras to CSM (Section 8.12.2). This makes mapprojection faster, and also can help solve for jitter (Section 16.38).
8.7.7. Validation and alignment¶
A LOLA point cloud
can be downloaded for the area of interest. Download the RDR data as a
PointPerRow CSV table.
The produced DEM can be aligned to LOLA with pc_align (Section 16.53),
with a command as:
pc_align --max-displacement 500 \
--csv-format 2:lon,3:lat,4:radius_km \
--save-inv-transformed-reference-points \
run/run-DEM.tif LOLA.csv \
-o run/run-align
8.7.8. Solving for jitter¶
LRO NAC images can have jitter. A process as for CTX in Section 16.38.8 usually works well to remove it (see also a multi-image example in Section 16.38.8.5).