8.13. Dawn (FC) Framing Camera¶
This is a NASA mission to visit two of the largest objects in the asteroid belt, Vesta and Ceres. The framing camera on board Dawn is quite small and packs only a resolution of 1024x1024 pixels. This means processing time is extremely short. To its benefit, it seems that the mission planners leave the framing camera on taking shots quite rapidly. On a single pass, they seem to usually take a chain of FC images that have a high overlap percentage. This opens the idea of using ASP to process not only the sequential pairs, but also the wider baseline shots. Then someone could potentially average all the DEMs together to create a more robust data product.
For this example, we used the images FC21A0010191_11286212239F1T and FC21A0010192_11286212639F1T which show the Cornelia crater on Vesta. We learned about them from the anaglyph shown on the Planetary Science Blog [Mac12].
A different example (using CSM cameras) is in Section 8.12.1.
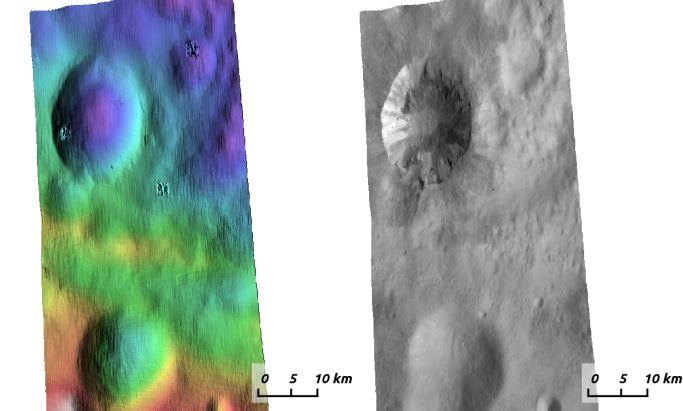
Fig. 8.21 Example colorized height map and ortho image output.¶
8.13.1. Commands¶
First you must download and unzip the Dawn FC images from PDS from https://sbib.psi.edu/data/PDS-Vesta/pds-vesta.html:
wget https://sbib.psi.edu/data/PDS-Vesta/HAMO/img-1A/FC21A0010191_11286212239F1T.IMG.gz
wget https://sbib.psi.edu/data/PDS-Vesta/HAMO/img-1A/FC21A0010192_11286212639F1T.IMG.gz
gunzip FC21A0010191_11286212239F1T.IMG.gz
gunzip FC21A0010192_11286212639F1T.IMG.gz
Then, these are converted to ISIS .cub files and parallel_stereo is run:
dawnfc2isis from=FC21A0010191_11286212239F1T.IMG \
to=FC21A0010191_11286212239F1T.cub target=VESTA
dawnfc2isis from=FC21A0010192_11286212639F1T.IMG \
to=FC21A0010192_11286212639F1T.cub target=VESTA
spiceinit from=FC21A0010191_11286212239F1T.cub
spiceinit from=FC21A0010192_11286212639F1T.cub
parallel_stereo FC21A0010191_11286212239F1T.cub \
FC21A0010192_11286212639F1T.cub stereo/stereo
A DEM is then created with point2dem (Section 16.56):
point2dem stereo-PC.tif --orthoimage stereo-L.tif \
--t_srs "+proj=eqc +lat_ts=-11.5 +a=280000 +b=229000 +units=m"
The option target=VESTA is necessary with ISIS version 5, and is
likely not needed in later versions.
See Section 6 for a discussion about various speed-vs-quality choices when it comes to stereo algorithms.