8.12. Community Sensor Model¶
The Community Sensor Model (CSM), established by the U.S. defense and intelligence community, has the goal of standardizing camera models for various remote sensor types [Gro07]. It provides a well-defined application program interface (API) for multiple types of sensors and has been widely adopted by Earth remote sensing software systems [HK17, LMH20].
ASP supports and ships the USGS implementation of CSM for planetary images, which provides Linescan, Frame, Pushframe, and Synthetic Aperture Radar (SAR) implementations.
CSM is handled via dynamically loaded plugins. Hence, if a user has a new sensor model, ASP should, in principle, be able to use it as soon as a supporting plugin is added to the existing software, without having to rebuild ASP or modify it otherwise. In practice, while this logic is implemented, ASP defaults to using only the USGS implementation, though only minor changes are needed to support additional plugins.
Each stereo pair to be processed by ASP should be made up of two
images (for example .cub or .tif files) and two plain
text camera files with .json extension. The CSM information is
contained in the .json files and it determines which plugin to
load to use with those cameras.
CSM model state data can also be embedded in ISIS .cub files (Section 8.12.7).
8.12.1. The USGS CSM Frame sensor¶
The USGS CSM Frame sensor models a frame camera. All the pixels get acquired at the same time, unlike for pushbroom and pushframe cameras, which keep on acquiring image lines as they fly (those are considered later in the text). Hence, a single camera center and orientation is present. This model serves the same function as ASP’s own Pinhole camera model (Section 20.1).
Section 20.3 discusses the CSM Frame sensor in some detail, including the distortion model.
In this example we will consider images acquired with the Dawn
Framing Camera instrument, which took pictures of the Ceres and Vesta
asteroids. This particular example will be for Vesta. Note that one
more example of this sensor is shown in this documentation, in
Section 8.13, which uses ISIS .cub camera models rather
than CSM ones.
This example is available for download.
8.12.1.1. Creating the input images¶
Fetch the data from PDS then extract it:
wget https://sbib.psi.edu/data/PDS-Vesta/Survey/img-1B/FC21B0004011_11224024300F1E.IMG.gz
wget https://sbib.psi.edu/data/PDS-Vesta/Survey/img-1B/FC21B0004012_11224030401F1E.IMG.gz
gunzip FC21B0004011_11224024300F1E.IMG.gz
gunzip FC21B0004012_11224030401F1E.IMG.gz
For simplicity of notation, we will rename these to left.IMG and right.IMG.
Set up the ISIS environment (Section 2.3.1).
These will need adjusting for your system:
export ISISROOT=$HOME/miniconda3/envs/isis
export PATH=$ISISROOT/bin:$PATH
export ISISDATA=$HOME/isisdata
Create cub files and initialize the kernels:
dawnfc2isis from = left.IMG to = left.cub target = VESTA
dawnfc2isis from = right.IMG to = right.cub target = VESTA
spiceinit from = left.cub
spiceinit from = right.cub
The target field is likely no longer needed in newer versions of
ISIS.
8.12.1.2. Creation of CSM Frame camera files¶
Set:
export ALESPICEROOT=$ISISDATA
Run the isd_generate command to create the CSM camera files. This script
is part of the ALE package, and should be shipped with the latest ISIS
or ASP, if installed with conda. It can also be installed separately.
isd_generate -k left.cub left.cub
isd_generate -k right.cub right.cub
This will create left.json and right.json.
See the isd_generate manual.
As a sanity check, run cam_test (Section 16.9) to see how well the CSM
camera approximates the ISIS camera:
cam_test --image left.cub --cam1 left.cub --cam2 left.json
cam_test --image right.cub --cam1 right.cub --cam2 right.json
Note that for a handful of pixels these errors may be big. That is a known issue, and it seems to be due to the fact that a ray traced from the camera center towards the ground may miss the body of the asteroid. That should not result in inaccurate stereo results.
8.12.1.3. Running stereo¶
parallel_stereo --stereo-algorithm asp_mgm \
--left-image-crop-win 243 161 707 825 \
--right-image-crop-win 314 109 663 869 \
left.cub right.cub left.json right.json \
run/run
See Section 6 for a discussion about various speed-vs-quality choices when running stereo.
This is followed by creation of a DEM (Section 16.56) and products that can be visualized (Section 6.2.6):
point2dem run/run-PC.tif --orthoimage run/run-L.tif
hillshade run/run-DEM.tif
colormap run/run-DEM.tif -s run/run-DEM_HILLSHADE.tif
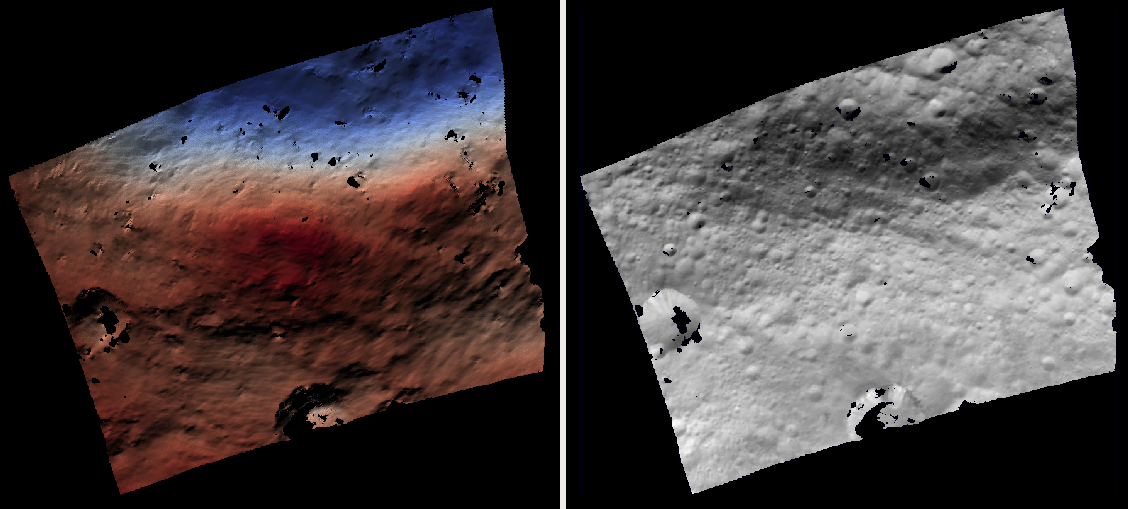
Fig. 8.14 The produced colorized DEM and orthoimage for the CSM Frame camera example. Likely using mapprojection (Section 6.1.7) may have reduced the number and size of the holes in the DEM.¶
8.12.2. The USGS CSM linescan sensor¶
In this example we will use the Mars CTX linescan sensor. The images are regular
.cub files as in the tutorial in Section 4.2, hence the only
distinction compared to that example is that the cameras are stored as .json
files.
We will work with the dataset pair:
J03_045994_1986_XN_18N282W.cub J03_046060_1986_XN_18N282W.cub
which, for simplicity, we will rename to left.cub and right.cub
and the same for the associated camera files.
See Section 8.14 for another linescan example for the Kaguya linescan sensor for the Moon.
8.12.2.1. Creation CSM linescan cameras¶
Note that this recipe looks a little different for Frame and SAR cameras, as can be seen in Section 8.12.1.2 and Section 8.12.4.2.
Run the ISIS spiceinit command on the .cub files as:
spiceinit from = left.cub
spiceinit from = right.cub
Next, CSM cameras are created, with isd_generate. This program is discussed
in Section 8.12.1.2.
Note: Currently shipped version of isd_generate (in ALE 1.0.2) has a bug,
creating very large linescan camera models that are very slow to load. If this
is noticed, consider putting this fix in the type_sensor.py file in
the ALE package.
Run:
isd_generate left.cub
isd_generate right.cub
This will produce left.json and right.json.
See the isd_generate manual.
8.12.2.2. Running stereo¶
parallel_stereo --stereo-algorithm asp_mgm \
--subpixel-mode 9 \
left.cub right.cub left.json right.json \
run/run
Check the stereo convergence angle as printed during preprocessing (Section 8.1). If that angle is small, the results are not going to be great.
See Section 6 for a discussion about various stereo algorithms and speed-vs-quality choices.
The actual stereo session used is csm, and here it will be
auto-detected based on the extension of the camera files.
Next, a DEM is produced (Section 16.56):
point2dem -r mars --stereographic \
--proj-lon 77.4 --proj-lat 18.4 \
run/run-PC.tif
For point2dem we chose to use a stereographic projection centered at
some point in the area of interest. See Section 16.56.1
for how how a projection for the DEM can be auto-determined.
One can also run parallel_stereo with mapprojected images
(Section 6.1.7). The first step would be to create a
low-resolution smooth DEM from the previous cloud:
point2dem -r mars \
--stereographic \
--proj-lon 77.4 --proj-lat 18.4 \
--tr 120 \
run/run-PC.tif \
-o run/run-smooth
followed by mapprojecting onto it and redoing stereo:
mapproject --tr 6 run/run-smooth-DEM.tif left.cub \
left.json left.map.tif
mapproject --tr 6 run/run-smooth-DEM.tif right.cub \
right.json right.map.tif
parallel_stereo --stereo-algorithm asp_mgm \
--subpixel-mode 9 \
left.map.tif right.map.tif left.json right.json \
run_map/run run/run-smooth-DEM.tif
Notice how we used the same grid size (ground sample distance) for both images
when mapprojecting. The ground sample distance is sensor-dependent. It can be
auto-computed by mapproject if not known (Section 6.1.7.4).
8.12.3. CSM Pushframe sensor¶
The USGS CSM Pushframe sensor models a pushframe camera. The support for this sensor is not fully mature, and some artifacts can be seen in the DEMs (per below).
Such data can also be handled with joint bundle adjustment of the framelets and pairwise stereo as done for TGO CaSSIS (Section 8.17).
What follows is an illustration of using this sensor with Lunar Reconnaissance Orbiter (LRO) WAC images.
This example, including the inputs, recipe, and produced terrain model can be downloaded.
8.12.3.1. Fetching the data¶
We will focus on the monochromatic images for this sensor. Visit:
Find the Lunar Reconnaissance Orbiter -> Experiment Data Record Wide Angle Camera - Mono (EDRWAM) option.
Search either based on a longitude-latitude window, or near a notable feature, such as a named crater. We choose a couple of images having the Tycho crater, with download links:
http://pds.lroc.asu.edu/data/LRO-L-LROC-2-EDR-V1.0/LROLRC_0002/DATA/MAP/2010035/WAC/M119923055ME.IMG
http://pds.lroc.asu.edu/data/LRO-L-LROC-2-EDR-V1.0/LROLRC_0002/DATA/MAP/2010035/WAC/M119929852ME.IMG
Fetch these with wget.
8.12.3.2. Creation of .cub files¶
We broadly follow the tutorial at [Ohman15]. For a
dataset called image.IMG, do:
lrowac2isis from = image.IMG to = image.cub
This will create so-called even and odd datasets, with names like
image.vis.even.cub and image.vis.odd.cub.
Run spiceinit on them to set up the SPICE kernels:
spiceinit from = image.vis.even.cub
spiceinit from = image.vis.odd.cub
followed by lrowaccal to adjust the image intensity:
lrowaccal from = image.vis.even.cub to = image.vis.even.cal.cub
lrowaccal from = image.vis.odd.cub to = image.vis.odd.cal.cub
All these .cub files can be visualized with stereo_gui. It can be
seen that instead of a single contiguous image we have a set of narrow
horizontal framelets, with some of these in the even and some in the odd
cub file. The framelets may also be recorded in reverse.
8.12.3.3. Production of seamless mapprojected images¶
This is not needed for stereo, but may be useful for readers who would
like to produce image mosaics using cam2map.
cam2map from = image.vis.even.cal.cub to = image.vis.even.cal.map.cub
cam2map from = image.vis.odd.cal.cub to = image.vis.odd.cal.map.cub \
map = image.vis.even.cal.map.cub matchmap = true
Note how in the second cam2map call we used the map and
matchmap arguments. This is to ensure that both of these output
images have the same resolution and projection. In particular, if more
datasets are present, it is suggested for all of them to use the same
previously created .cub file as a map reference. That because stereo
works a lot better on mapprojected images with the same ground
resolution. For more details see Section 6.1.7 and
Section 14.6.2.
To verify that the obtained images have the same ground resolution, do:
gdalinfo image.vis.even.cal.map.cub | grep -i "pixel size"
gdalinfo image.vis.odd.cal.map.cub | grep -i "pixel size"
(see Section 16.25 regarding this tool).
The fusion happens as:
ls image.vis.even.cal.map.cub image.vis.odd.cal.map.cub > image.txt
noseam fromlist = image.txt to = image.noseam.cub SAMPLES=73 LINES=73
The obtained file image.noseam.cub may still have some small artifacts
but should be overall reasonably good.
8.12.3.4. Stitching the raw even and odd images¶
This requires ISIS newer than version 6.0, or the latest development code.
For each image in the stereo pair, stitch the even and odd datasets:
framestitch even = image.vis.even.cal.cub odd = image.vis.odd.cal.cub \
to = image.cub flip = true num_lines_overlap = 2
The flip flag is needed if the order of framelets is reversed
relative to what the image is expected to show.
The parameter num_lines_overlap is used to remove a total of this
many lines from each framelet (half at the top and half at the bottom)
before stitching, in order to deal with the fact that the even and odd
framelets have a little overlap, and that they also tend to have artifacts
due to some pixels flagged as invalid in each first and last framelet
row.
The CSM camera models will assume that this parameter is set at 2, so it should not be modified. Note however that WAC framelets may overlap by a little more than that, so resulting DEMs may have some artifacts at framelet borders, as can be seen further down.
8.12.3.5. Creation of CSM WAC cameras¶
Set:
export ALESPICEROOT=$ISISDATA
CSM cameras are created, with isd_generate. This program is discussed
in Section 8.12.1.2. Run:
isd_generate -k image.vis.even.cal.cub image.vis.even.cal.cub
isd_generate -k image.vis.odd.cal.cub image.vis.odd.cal.cub
These will create image.vis.even.cal.json and image.vis.odd.cal.json.
Do not use the stitched .cub file as that one lacks camera information. The obtained .json files can be renamed to follow the same convention as the stitched .cub images.
8.12.3.6. Running stereo¶
parallel_stereo --stereo-algorithm asp_mgm \
--left-image-crop-win 341 179 727 781 \
--right-image-crop-win 320 383 824 850 \
M119923055ME.cub M119929852ME.cub \
M119923055ME.json M119929852ME.json \
run/run
As printed by stereo_pprc, the convergence angle is about 27
degrees, which is a good number.
See Section 6 for a discussion about various stereo speed-vs-quality choices.
A DEM is produced with point2dem (Section 16.56), and other products
are made for visualization (Section 6.2):
point2dem --stereographic --auto-proj-center \
run/run-PC.tif --orthoimage run/run-L.tif
hillshade run/run-DEM.tif
colormap run/run-DEM.tif -s run/run-DEM_HILLSHADE.tif
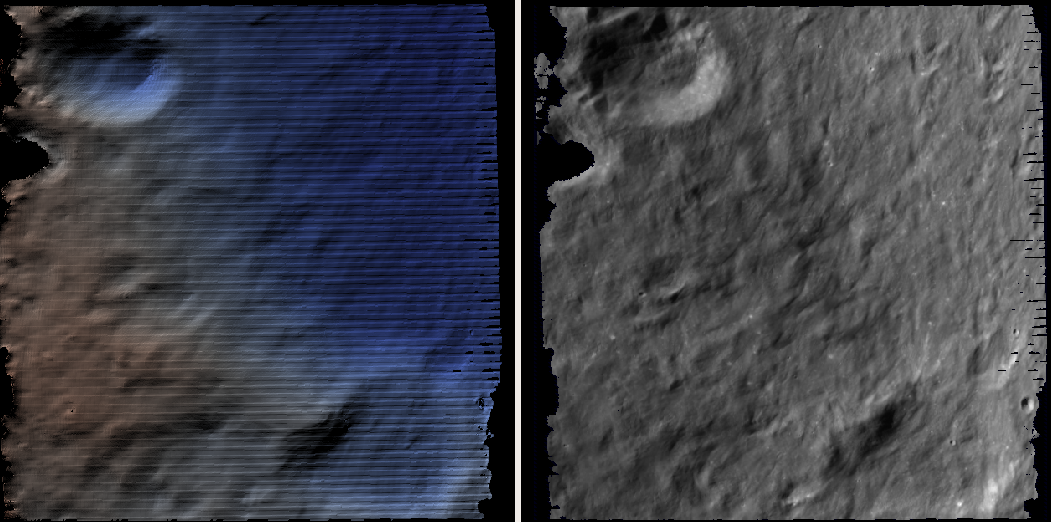
Fig. 8.15 The produced colorized DEM and orthoimage for the CSM WAC camera example. The artifacts are due to issues stitching of even and odd framelets.¶
It can be seen that the stereo DEM has some linear artifacts. That is due to the fact that the stitching does not perfectly integrate the framelets.
An improved solution can be obtained by creating a low-resolution version of the above DEM, mapprojecting the images on it, and then re-running stereo, per (Section 6.1.7).
point2dem --stereographic --auto-proj-center \
--tr 800 run/run-PC.tif --search-radius-factor 5 \
-o run/run-low-res
mapproject --tr 80 run/run-low-res-DEM.tif \
M119923055ME.cub M119923055ME.json M119923055ME.map.tif
mapproject --tr 80 run/run-low-res-DEM.tif \
M119929852ME.cub M119929852ME.json M119929852ME.map.tif
parallel_stereo --stereo-algorithm asp_mgm \
M119923055ME.map.tif M119929852ME.map.tif \
M119923055ME.json M119929852ME.json \
run_map/run run/run-low-res-DEM.tif
point2dem --stereographic --auto-proj-center \
run_map/run-PC.tif --orthoimage run_map/run-L.tif
hillshade run_map/run-DEM.tif
colormap run_map/run-DEM.tif -s run_map/run-DEM_HILLSHADE.tif
To create the low-resolution DEM we used a grid size of 800 m, which is coarser by a factor of about 8 compared to the nominal WAC resolution of 100 / pixel.
Note that the same resolution is used when mapprojecting both images; that is very important to avoid a large search range in stereo later. This is discussed in more detail in Section 6.1.7.
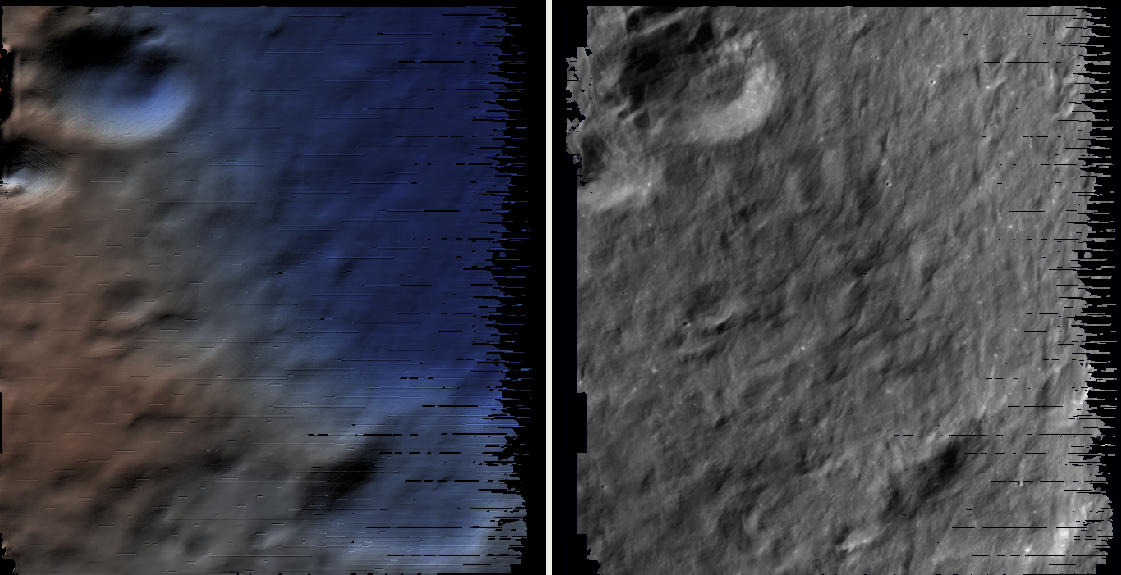
Fig. 8.16 The produced colorized DEM and orthoimage for the CSM WAC camera example, when mapprojected images are used.¶
As can be seen in the second figure, there are somewhat fewer artifacts.
The missing lines in the DEM could be filled in if point2dem was run
with --search-radius-factor 4, for example.
Given that there exists a wealth of WAC images, one could also try to
get several more stereo pairs with similar illumination, run bundle
adjustment for all of them (Section 16.5), run pairwise
stereo, create DEMs (at the same resolution), and then merge them with
dem_mosaic (Section 16.20). This may further attenuate the
artifacts as each stereo pair will have them at different
locations. See Section 8.1 for guidelines about how to
choose good stereo pairs.
8.12.4. The USGS CSM SAR sensor for LRO Mini-RF¶
This page describes processing data produced with the Mini-RF Synthetic Aperture Radar (SAR) sensor on the LRO spacecraft while making use of CSM cameras. A SAR example for Earth is in Section 8.33.
It is challenging to process its data with ASP for several reasons:
The synthetic image formation model produces curved rays going from the ground to the pixel in the camera ([KBW+16]). To simplify the calculations, ASP finds where a ray emanating from the camera intersects the standard Moon ellipsoid with radius 1737.4 km and declares the ray to be a straight line from the camera center to this point.
This sensor very rarely acquires stereo pairs. The convergence angle (Section 8.1) as printed by
parallel_stereoin pre-processing is usually less than 5 degrees, which is little and results in noisy DEMs. In this example we will use a dataset intentionally created with stereo in mind. The images will cover a part of Jackson crater ([KHKB+11]).It is not clear if all modeling issues with this sensor were resolved. The above publication states that “Comparison of the stereo DTM with ~250 m/post LOLA grid data revealed (in addition to dramatically greater detail) a very smooth discrepancy that varied almost quadratically with latitude and had a peak-to-peak amplitude of nearly 4000 m.”
The images are dark and have unusual appearance, which requires some pre-processing and a large amount of interest points.
Hence, ASP’s support for this sensor is experimental. The results are plausible but likely not fully rigorous.
This example, including input images, produced outputs, and a recipe, is available for download at:
No ISIS data are needed to run it.
8.12.4.1. Creating the input images¶
Fetch the data from PDS:
wget https://pds-geosciences.wustl.edu/lro/lro-l-mrflro-4-cdr-v1/lromrf_0002/data/sar/03800_03899/level1/lsz_03821_1cd_xku_16n196_v1.img
wget https://pds-geosciences.wustl.edu/lro/lro-l-mrflro-4-cdr-v1/lromrf_0002/data/sar/03800_03899/level1/lsz_03821_1cd_xku_16n196_v1.lbl
wget https://pds-geosciences.wustl.edu/lro/lro-l-mrflro-4-cdr-v1/lromrf_0002/data/sar/03800_03899/level1/lsz_03822_1cd_xku_23n196_v1.img
wget https://pds-geosciences.wustl.edu/lro/lro-l-mrflro-4-cdr-v1/lromrf_0002/data/sar/03800_03899/level1/lsz_03822_1cd_xku_23n196_v1.lbl
These will be renamed to left.img, right.img, etc., to simply
the processing.
Set, per Section 2.3.1, values for ISISROOT and ISISDATA. Run:
mrf2isis from = left.lbl to = left.cub
mrf2isis from = right.lbl to = right.cub
Run spiceinit. Setting the shape to the ellipsoid makes it easier
to do image-to-ground computations:
spiceinit from = left.cub shape = ellipsoid
spiceinit from = right.cub shape = ellipsoid
8.12.4.2. Creation of CSM SAR cameras¶
Set:
export ALESPICEROOT=$ISISDATA
CSM cameras are created, with isd_generate. This program is discussed
in Section 8.12.1.2. Run:
isd_generate -k left.cub left.cub
isd_generate -k right.cub right.cub
This will create the CSM camera file left.json and right.json.
Run cam_test (Section 16.9) as a sanity check:
cam_test --image left.cub --cam1 left.cub --cam2 left.json
cam_test --image right.cub --cam1 right.cub --cam2 right.json
8.12.4.3. Preparing the images¶
ASP accepts only single-band images, while these .cub files have four of them. We will pull the first band and clamp it to make it easier for stereo to find interest point matches:
gdal_translate -b 1 left.cub left_b1.tif
gdal_translate -b 1 right.cub right_b1.tif
image_calc -c "min(var_0, 0.5)" left_b1.tif -d float32 \
-o left_b1_clamp.tif
image_calc -c "min(var_0, 0.5)" right_b1.tif -d float32 \
-o right_b1_clamp.tif
8.12.4.4. Running stereo¶
It is simpler to first run a clip with stereo_gui
(Section 16.72). This will result in the following command:
parallel_stereo --ip-per-tile 3500 \
--left-image-crop-win 0 3531 3716 10699 \
--right-image-crop-win -513 22764 3350 10783 \
--stereo-algorithm asp_mgm --min-matches 10 \
left_b1_clamp.tif right_b1_clamp.tif \
left.json right.json run/run
The stereo convergence angle for this pair is 18.4 degrees which is rather decent.
Create a colorized DEM and orthoimage (Section 16.56):
point2dem run/run-PC.tif --orthoimage run/run-L.tif
hillshade run/run-DEM.tif
colormap run/run-DEM.tif -s run/run-DEM_HILLSHADE.tif
See Section 6 for a discussion about various speed-vs-quality choices when running stereo.
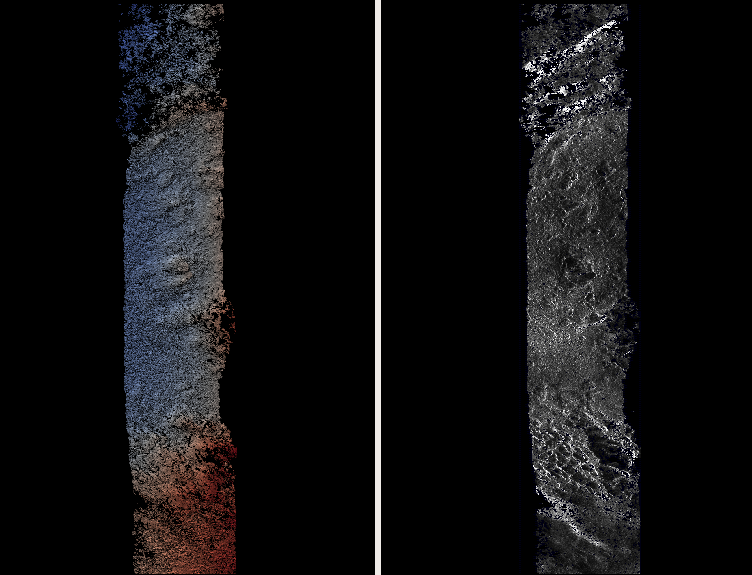
Fig. 8.17 The produced colorized DEM and orthoimage for the CSM SAR example.¶
8.12.5. CSM cameras for MSL¶
This example shows how, given a set of Mars Science Laboratory (MSL) Curiosity
rover Nav or Mast camera images, CSM camera models can be created. Stereo
pairs are then used (with either Nav or Mast data) to make DEMs and
orthoimages.
After recent fixes in ALE (details below), the camera models are accurate enough that stereo pairs acquired at different rover locations and across different days result in consistent DEMs and orthoimages.
See Section 10.3 for a Structure-from-Motion solution without using CSM cameras. That one results in self-consistent meshes that, unlike the DEMs produced here, are not geolocated.
8.12.5.1. Illustration¶
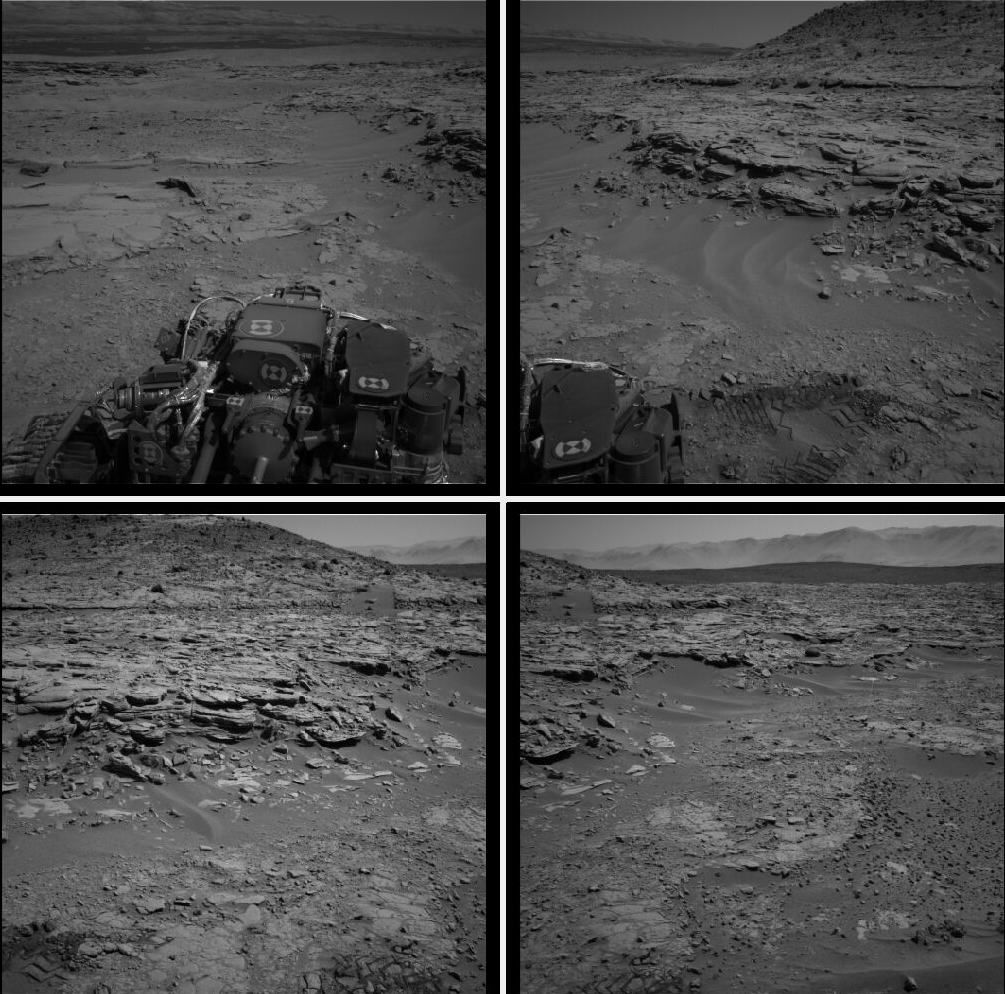
Fig. 8.18 Four out of the 10 images (5 stereo pairs) used in this example.¶
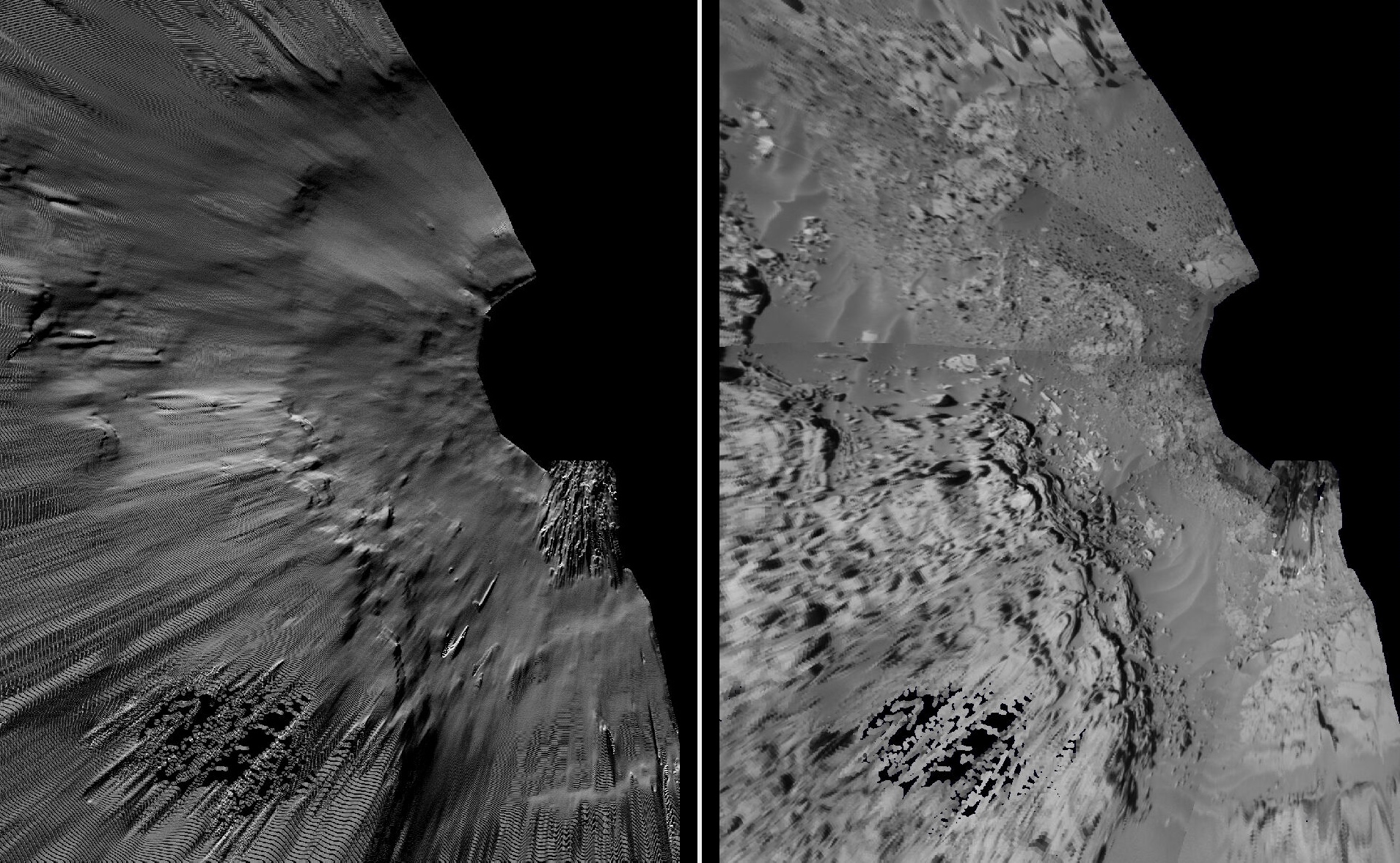
Fig. 8.19 Produced DEM and orthoimage. See Section 8.12.5.6 for a larger example.¶
8.12.5.2. Fetch the images and metadata from PDS¶
See Section 10.3.5. Here we will work with .cub files rather than converting them to .png. The same Mars day will be used as there (SOL 597). The datasets for SOL 603 were verified to work as well.
The dataset used in this example (having .LBL, .cub, and .json files) is available for download. It is suggested to recreate the .json files in that dataset as done below.
8.12.5.3. Download the SPICE data¶
Fetch the SPICE kernels for MSL (see Section 2.3.1 and the links from there).
8.12.5.4. Creation of CSM MSL cameras¶
Set:
export ALESPICEROOT=$ISISDATA
A full-resolution MSL left Nav image uses the naming convention:
NLB_<string>_F<string>.cub
with the right image starting instead with NRB. The metadata files
downloaded from PDS end with .LBL.
A bug in the shipped metakernels requires editing the file:
$ISISDATA/msl/kernels/mk/msl_v01.tm
and replacing:
/usgs/cpkgs/isis3/data
with your value of $ISISDATA. Ensure that the resulting path still ends with
/msl/kernels.
CSM cameras are created, with isd_generate. This program is discussed
in Section 8.12.1.2. Run:
isd_generate image.LBL
This will produce the file image.json.
If running into issues, invoke this command with the -v option to see where
it fails.
8.12.5.5. Simple stereo example¶
In this example the camera orientations are not refined using bundle adjustment,
as the camera poses are reasonably good. If desired to do that, one could run
bundle_adjust (Section 16.5) as:
bundle_adjust --no-datum --camera-weight 0 --tri-weight 0.1 \
data/*.cub data/*.json -o ba/run
Here and below we use the option --no-datum as these are ground-level cameras,
when rays emanating from them may not reliably intersect the planet datum.
For each stereo pair, run parallel_stereo (Section 16.51) as:
parallel_stereo \
--stereo-algorithm asp_mgm \
--subpixel-mode 3 --no-datum \
--min-triangulation-angle 1.5 \
left.cub right.cub \
left.json right.json \
run/run
If bundle adjustment was used, the above command should be run with the option
--bundle-adjust-prefix ba/run.
The option --min-triangulation-angle 1.5 is highly essential. It filters out
far-away and noisy points. Increasing this will remove more points. For
terrains with a lot of shadows (such as for the Moon), also consider using the
option --no-data-value to filter out pixels with low intensity
(Section 17).
This is followed by DEM and orthoimage creation (Section 16.56) with:
point2dem --stereographic \
--proj-lon 137.402 --proj-lat -4.638 \
--search-radius-factor 5 --orthoimage \
run/run-PC.tif run/run-L.tif
Here, the option --search-radius-factor 5 is used to fill the point cloud
when moving further from the rover. A local stereographic projection was used.
The produced DEMs can be mosaicked together with dem_mosaic
(Section 16.20) as:
dem_mosaic */*DEM.tif -o dem_mosaic.tif
For the orthoimages, one can use:
dem_mosaic --first */*DRG.tif -o ortho_mosaic.tif
The option --first picks the first encountered image pixel at each location,
rather than blending them together which may blur the output mosaic.
See an illustration in Fig. 8.19, with the input images in Fig. 8.18.
8.12.5.6. Multi-day stereo¶
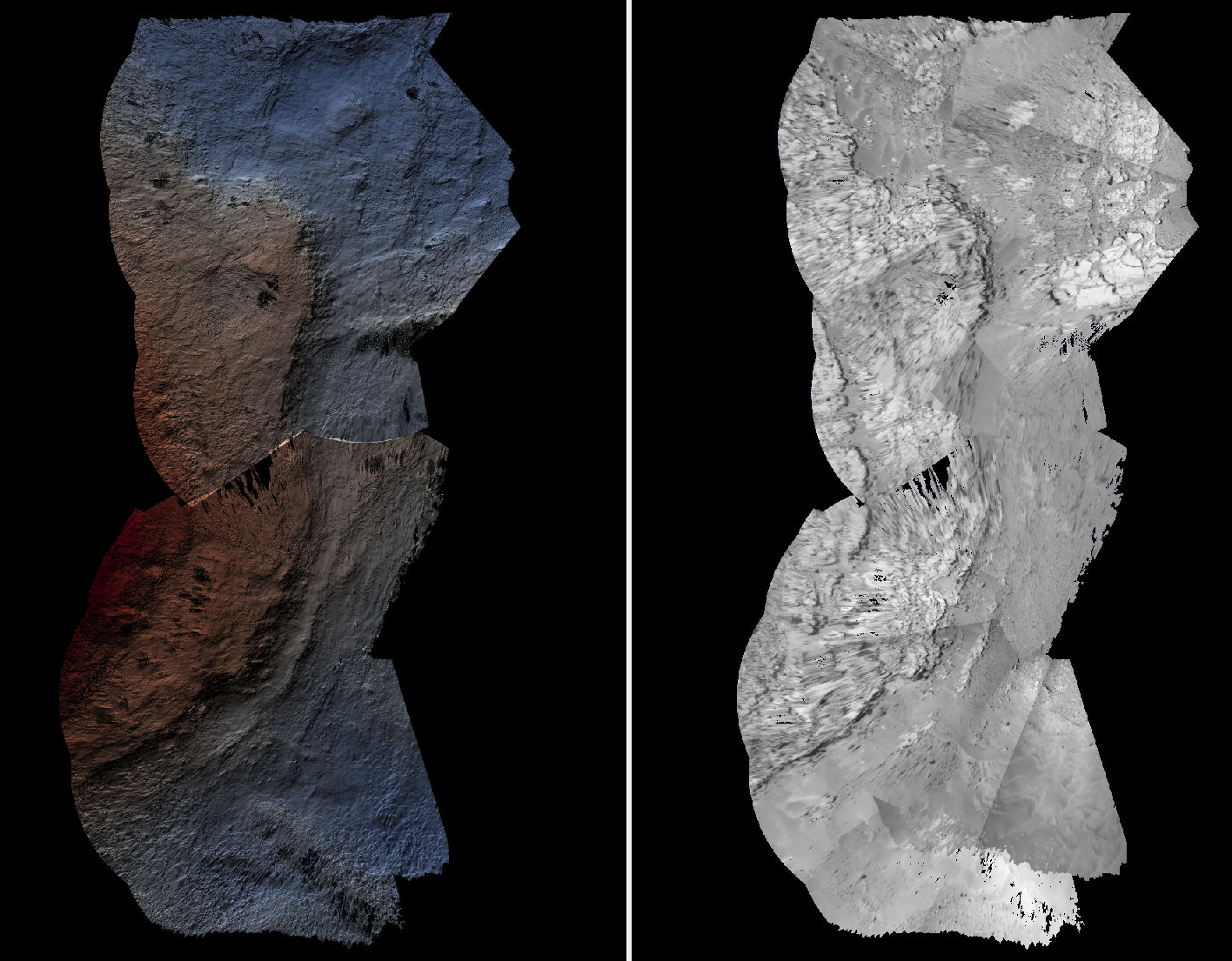
Fig. 8.20 A combined DEM and orthoimage produced from 15 stereo pairs from SOL 597 and 13 stereo pairs from SOL 603. The misregistration half-way down is not due to mismatch across days but because of insufficient overlap between two image subsets on SOL 603. Here, blue and red correspond to elevations of -5038.921 and -5034.866 meters.¶
In this example we take advantage of the fact that there is decent overlap between images acquired on SOL 597 and SOL 603. They both image the same hill, called Kimberly, in Gale crater, from somewhat different perspectives. Hence we combine these datasets to increase the coverage.
Good overlap between different days, or even between consecutive rover stops in the same day, is not guaranteed. Sometimes the low-resolution nav cam images (Section 8.12.5.9) can help with increasing the overlap and coverage. Lack of good overlap can result in registration errors, as can be seen in Fig. 8.20.
For a larger and better-behaved dataset it is suggested to consider the images from SOL 3551 to 3560. Some effort may be needed to select a good subset.
A workflow can be follows. First, individual DEMs were created and mosaicked, as in Section 8.12.5. The quality of the produced DEM can be quite uneven, especially far from the camera.
Large holes in the initial DEM were filled in with the dem_mosaic option
--fill-search-radius (Section 16.20.2.9).
Then, it can be made coarser, for example, as:
gdalwarp -r cubic -tr 0.1 0.1 input.tif output.tif
(This assumes the projection is local stereographic.)
This DEM was then blurred a few times with dem_mosaic option
--dem-blur-sigma 10. This should be repeated until the DEM is smooth enough
and shows no artifacts. The resulting DEM is called dem.tif.
All images were mapprojected onto this DEM using the same local stereographic projection, and a resolution of 0.01 m:
proj="+proj=stere +lat_0=-4.638 +lon_0=137.402 +k=1 +x_0=0 +y_0=0 +R=3396190 +units=m +no_defs"
mapproject --tr 0.01 --t_srs "$proj" \
dem.tif image.cub image.json image.map.tif
Bundle adjustment was run on the desired set of input images and cameras, while making use of the mapprojected images to find matches:
dem=dem.tif
parallel_bundle_adjust \
--image-list images.txt \
--camera-list cameras.txt \
--mapprojected-data-list map_images.txt \
--camera-weight 0 \
--heights-from-dem $dem \
--heights-from-dem-uncertainty 10.0 \
--heights-from-dem-robust-threshold 0.1 \
--auto-overlap-params "$dem 15" \
-o ba/run
In retrospect, this mapprojection step may be not necessary, and one could run bundle adjustment with original images.
Then parallel_stereo was run with mapprojected images, with the option
--bundle-adjust-prefix ba/run, to use the bundle-adjusted cameras:
parallel_stereo \
--stereo-algorithm asp_mgm \
--subpixel-mode 9 \
--max-disp-spread 80 \
--min-triangulation-angle 1.5 \
--bundle-adjust-prefix ba/run \
left.map.tif right.map.tif \
left.json right.json run_map/run \
$dem
point2dem --tr 0.01 --stereographic \
--proj-lon 137.402 --proj-lat -4.638 \
--errorimage \
run_map/run-PC.tif \
--orthoimage run_map/run-L.tif
Each run must use a separate output prefix, instead of run_map/run.
Here, the option --min-triangulation-angle 1.5 was highly essential.
It filters out far-away and noisy points.
Even with this option, the accuracy of a DEM goes down far from the cameras.
Artifacts can arise where the same region is seen from two different locations,
and it is far from either. In this particular example some problematic portions
were cut out with gdal_rasterize (Section 16.72.7.2).
The produced DEMs were inspected, and the best ones were mosaicked together with
dem_mosaic, as follows:
dem_mosaic --weights-exponent 0.5 */*DEM.tif -o dem_mosaic.tif
The option --weights-exponent 0.5 reduced the artifacts in blending.
The orthoimages were mosaicked with:
dem_mosaic --first */*DRG.tif -o ortho_mosaic.tif
It is suggested to sort the input images for this call from best to worst in terms of quality. In particular, the images where the rover looks down rather towards the horizon should be earlier in the list.
See the produced DEM and orthoimage in Fig. 8.20.
8.12.5.7. Mapprojection¶
The input .cub image files and the camera .json files can be used to create
mapprojected images with the mapproject program (Section 16.41).
The DEM for mapprojection can be the one created earlier with point2dem.
If a third-party DEM is used, one has to make sure its elevations are consistent
with the DEMs produced earlier.
Use the option --t_projwin to prevent the produced images from extending for
a very long distance towards the horizon.
8.12.5.8. MSL Mast cameras¶
The same procedure works for creating MSL Mast cameras. To run stereo, first use
gdal_translate -b 1 to pull the first band from the input images. This
workflow was tested with the stereo pair 0706ML0029980010304577C00_DRCL and
0706MR0029980000402464C00_DRCL for SOL 706.
8.12.6. CSM model state¶
CSM cameras are stored in JSON files, in one of the following two formats:
ISD: This has the transforms from sensor coordinates to J2000, and from J2000 to ECEF.
Model state: In this file the above-mentioned transforms are combined, and other information is condensed or removed.
The model state files have all the data needed to project ground points into the camera and vice-versa, so they are sufficient for any use in ASP. The model state can also be embedded in ISIS cubes (Section 8.12.7).
The usgscsm_cam_test program (shipped with ASP) can read any of these and write back a model state.
ASP’s bundle adjustment program (Section 16.5) normally writes plain
text .adjust files that encode how the position and orientation of the
cameras were modified (Section 16.5.12). If invoked for CSM cameras,
additional files with extension .adjusted_state.json are saved in the same
output directory, which contain the model state from the input CSM cameras with
the optimization adjustments applied to them. Use zero iterations in
bundle_adjust to save the states of the original cameras.
This functionality is implemented for all USGS CSM sensors, so, for frame,
linescan, pushframe, and SAR models.
The cam_gen program can convert several linescan camera model types to CSM
model state (Section 16.8.1.7). It can also approximate some Pinhole,
RPC, or other cameras with CSM frame cameras in model state format
(Section 16.8.1.4).
ASP’s parallel_stereo and bundle adjustment programs can, in addition to CSM
ISD camera model files, also load such model state files, either as previously
written by ASP or from an external source (it will auto-detect the type from the
format of the JSON files). Hence, the model state is a convenient format for
data exchange, while being less complex than the ISD format.
If parallel_stereo is used to create a point cloud from
images and CSM cameras, and then that point cloud has a transform
applied to it, such as with pc_align, the same transform can be
applied to the model states for the cameras using bundle_adjust
(Section 16.53.14).
To evaluate how well the obtained CSM camera approximates the ISIS
camera model, run the program cam_test shipped with ASP
(Section 16.9) as follows:
cam_test --sample-rate 100 --image camera.cub \
--cam1 camera.cub --cam2 camera.json
The pixel errors are expected to be at most on the order of 0.2 pixels.
8.12.7. CSM state embedded in ISIS cubes¶
ASP usually expects CSM cameras to be specified in JSON files. It also accepts CSM camera model state data (Section 8.12.6) embedded in ISIS cubes, if all of the following (reasonable) assumptions are satisfied:
JSON files are not passed in.
The ISIS cubes contain CSM model state data (in the
CSMStategroup).The
--session-type(or--t) option value is not set toisis(orisismapisis). So, its value should be eithercsm(orcsmmapcsm), or left blank.
Hence, if no CSM data is provided, either in the ISIS cubes or separately
in JSON files, or --session-type is set to isis (or isismapisis),
ASP will use the ISIS camera models.
The above applies to all ASP tools that read CSM cameras (parallel_stereo,
bundle_adjust, jitter_solve, mapproject, cam_test).
If bundle_adjust (Section 16.5) or jitter_solve
(Section 16.38) is run with CSM cameras, either embedded in ISIS cubes
or specified separately, and the flag --update-isis-cubes-with-csm-state is
set, then the optimized model states will be saved back to the ISIS cubes, while
the SPICE and other obsolete information from the cubes will be deleted.
(Note that spiceinit
can restore the cubes.)
Separate model state files in the JSON format will be saved by bundle_adjust
as well, as done without this option.
Note that if images are mapprojected with certain camera files, and then those camera files are updated in-place, this will result in wrong results if stereo is run with the old mapprojected images and updated cameras.
The csminit program can also embed a .json model state file into a .cub file (in ISIS 9.0.0 and later). Example:
csminit from = img.cub state = csm.json