8.11. Cassini ISS NAC¶
This is a proof of concept showing the strength of building the Stereo Pipeline on top of ISIS. Support for processing ISS NAC stereo pairs was not a goal during our design of the software, but the fact that a camera model exists in ISIS means that it too can be processed by the Stereo Pipeline.
Identifying stereo pairs from spacecraft that do not orbit their target is a challenge. We have found that one usually has to settle with images that are not ideal: different lighting, little perspective change, and little or no stereo parallax. So far we have had little success with Cassini’s data, but nonetheless we provide this example as a potential starting point.
8.11.1. Rhea¶
Rhea is the second largest moon of Saturn and is roughly a third the size of our own Moon. This example shows, at the top right of both images, a giant impact basin named Tirawa that is 220 miles across. The bright white area south of Tirawa is ejecta from a new crater. The lack of texture in this area poses a challenge for our correlator. The results are just barely useful: the Tirawa impact can barely be made out in the 3D data while the new crater and ejecta become only noise.
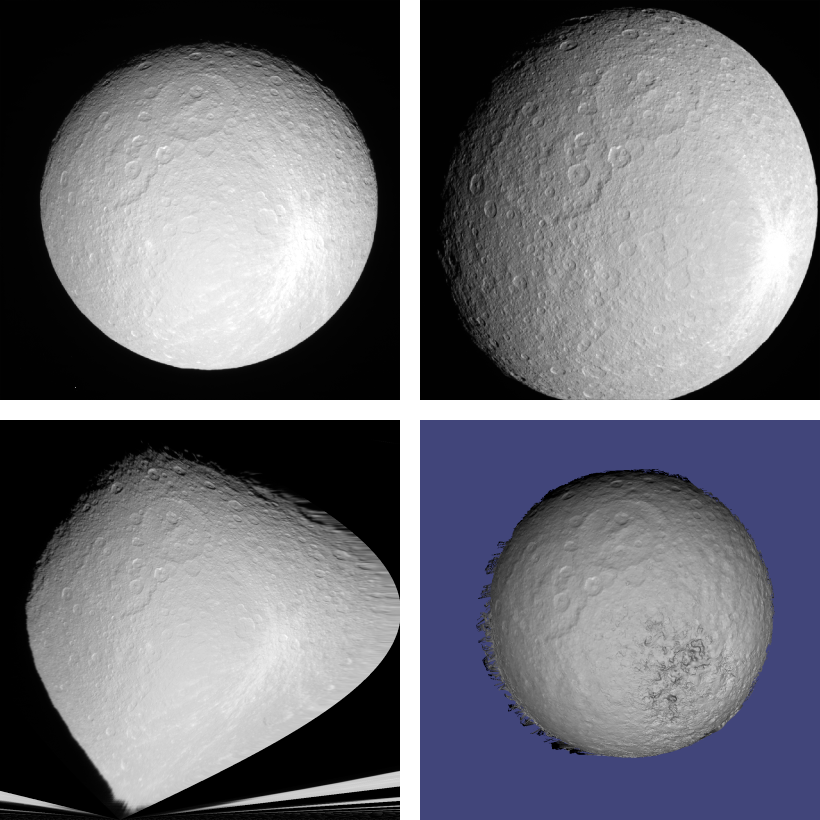
Fig. 8.13 Example output of what is possible with Cassini’s ISS NAC. Upper left: original left image. Upper right: original right image. Lower left: mapprojected left image. Lower right: 3D Rendering of the point cloud.¶
8.11.1.1. Commands¶
Download the N1511700120_1.IMG and W1567133629_1.IMG images and their label (.LBL) files from the PDS.
ISIS> ciss2isis f=N1511700120_1.LBL t=N1511700120_1.cub
ISIS> ciss2isis f=W1567133629_1.LBL t=W1567133629_1.cub
ISIS> cisscal from=N1511700120_1.cub to=N1511700120_1.lev1.cub
ISIS> cisscal from=W1567133629_1.cub to=W1567133629_1.lev1.cub
ISIS> fillgap from=W1567133629_1.lev1.cub to=W1567133629_1.fill.cub
(Note the optional fillgap command above.)
ISIS> cubenorm from=N1511700120_1.lev1.cub to=N1511700120_1.norm.cub
ISIS> cubenorm from=W1567133629_1.fill.cub to=W1567133629_1.norm.cub
ISIS> spiceinit from=N1511700120_1.norm.cub
ISIS> spiceinit from=W1567133629_1.norm.cub
ISIS> cam2map from=N1511700120_1.norm.cub to=N1511700120_1.map.cub
ISIS> cam2map from=W1567133629_1.norm.cub map=N1511700120_1.map.cub \
ISIS> to=W1567133629_1.map.cub matchmap=true
ISIS> parallel_stereo N1511700120_1.map.equ.cub \
W1567133629_1.map.equ.cub result/rhea
See Section 6 for a discussion about various speed-vs-quality choices.
Also consider the following modifications to stereo.default:
### PREPROCESSING
alignment-method none
force-use-entire-range
individually-normalize
### CORRELATION
prefilter-mode 2
prefilter-kernel-width 1.5
cost-mode 2
corr-kernel 25 25
corr-search -55 -2 -5 10
subpixel-mode 3
subpixel-kernel 21 21
### FILTERING
rm-half-kernel 5 5
rm-min-matches 60 # Units = percent
rm-threshold 3
rm-cleanup-passes 1